11. Torque
TLDRIn this physics lecture, Professor Ramamurti Shankar delves into the principles of torque and angular momentum as they apply to static equilibrium and rotational dynamics. The discussion begins with the foundational Newton's law analogue for rotation, τ = Iα, and explores scenarios where torque (τ) is non-zero, leading to acceleration (α) of a body. The professor then shifts to cases with no external torque, focusing on internal torques and the conditions for a body to remain at rest, with a detailed examination of the seesaw problem to illustrate these principles. The lecture progresses to more complex problems, such as a rod supported by a pivot and wall, and a ladder leaning against a wall, emphasizing the importance of torque calculations in maintaining equilibrium. Throughout the transcript, Shankar emphasizes the strategic choice of pivot points for simplifying torque calculations and the role of friction in real-world applications. The lecture concludes with an introduction to the cross product in three dimensions, which is crucial for defining torque and angular momentum vectors in space, and touches upon the behavior of a gyroscope under gravitational torque, highlighting the phenomenon of precession. This comprehensive overview provides a clear insight into the application of torque and angular momentum in static and dynamic scenarios.
Takeaways
- 📚 Professor Shankar introduces the study of static equilibrium, where no motion or torque is present, which is important for understanding objects like ladders that should not fall over.
- 🔧 To maintain equilibrium, the conditions are that the sum of forces in the x and y directions must be zero, and the sum of torques must also be zero.
- 🤔 The professor emphasizes the importance of choosing the right pivot point when calculating torque, especially when an unknown force like the normal force is involved.
- 📐 In the case of a seesaw, the torque equation is used to find the unknown force (F_2) required to balance the seesaw, without involving the normal force (N).
- 🧷 The torque due to gravity on an extended object like a rod can be calculated as if all the mass were concentrated at the center of mass, provided the gravitational force is constant over the rod's length.
- 🚫 When calculating torque, forces passing through the pivot point do not contribute to the torque, allowing for simplification of the problem.
- 🔄 The cross product is introduced to define torque and angular momentum in three dimensions, giving both magnitude and direction to the torque vector.
- ⚖️ The right-hand rule is used to determine the direction of the torque vector, which is perpendicular to the plane formed by the position vector (r) and the force vector (F).
- 🌀 Angular momentum (L) for a point mass is defined as the cross product of the position vector (r) and the momentum vector (p), which is conserved if the net external torque is zero.
- 🌐 In the case of a spinning gyroscope, the application of torque due to gravity results in precession, where the gyroscope rotates around a vertical axis instead of falling down.
- ⏱️ The precessional frequency of a spinning gyroscope is calculated by dividing the torque by the angular momentum of the gyroscope.
Q & A
What is the basic equation analogous to Newton's law that Professor Shankar initially discusses?
-The basic equation discussed is τ = Iα, which is analogous to Newton's law F = ma. Here, τ represents torque, I is the moment of inertia, and α is the angular acceleration.
Why does Professor Shankar emphasize that the total forces on an object must add up to zero to prevent motion?
-If the total forces on an object do not add up to zero, according to Newton's second law (F = ma), the object will experience a net force and consequently will accelerate or change its velocity, leading to motion.
What is the condition for a body to remain at rest and not rotate?
-For a body to remain at rest and not rotate, the forces along the x and y directions must add up to zero, ensuring the center of mass does not accelerate, and the torques (moments of the forces) about any point must add up to zero to prevent rotation.
Why is it important to consider the case where both torque and angular velocity are zero?
-Cases where both torque and angular velocity are zero are important to study because they represent stable equilibrium situations, such as a ladder leaning against a wall without falling, which is a common scenario that needs to be understood and calculated.
How does Professor Shankar approach the problem of finding the force F_2 needed to balance a seesaw with a known force F_1?
-Professor Shankar uses the equilibrium conditions, considering the horizontal and vertical forces, and the torque about a pivot point. By setting up the torque equation with respect to the pivot point, he eliminates the normal force N from the equation, allowing him to solve for the unknown force F_2.
What is the significance of choosing the pivot point for calculating torque?
-Choosing the pivot point for calculating torque is strategic because forces passing through the pivot point do not contribute to the torque. This allows for simplification of the problem, especially when the forces acting on the system are unknown.
How does the torque due to gravity on a non-uniform rod compare to that on a uniform rod?
-The torque due to gravity on both uniform and non-uniform rods can be calculated as if all the mass were concentrated at the center of mass. This is valid as long as the force of gravity is constant over the length of the rod, which is true for laboratory-scale rods regardless of their mass distribution.
What is the role of the horizontal component of the support force (H') in maintaining the equilibrium of a rod supported by a pivot and a wall?
-The horizontal component of the support force (H') is not needed for the rod to be in equilibrium under the action of gravity alone. However, if an external horizontal force is applied to the rod, H' would be required to counteract that force and maintain equilibrium.
Why does the tension in the wire supporting a rod against a wall depend on the angle θ?
-null
What is the minimum angle θ for a ladder leaning against a wall, considering the static friction?
-The minimum angle θ is determined by the condition that the static frictional force can support the weight of the ladder without slipping. This is given by the equation tan θ ≥ (1 / 2)μs, where μs is the coefficient of static friction.
How does the cross product operation define the torque and angular momentum in three dimensions?
-In three dimensions, the cross product allows for the definition of torque (τ = r × F) and angular momentum (L = r × p) as vectors. The cross product results in a vector that is perpendicular to the plane formed by the two original vectors (r and F for torque, r and p for angular momentum), and its direction is determined by the right-hand rule.
Outlines
📚 Introduction to Torque and Static Equilibrium
Professor Shankar begins by reviewing the concept of torque, represented by τ = Iα, where I is the moment of inertia and α is the angular acceleration. He differentiates between scenarios with and without external torques and introduces the special case of no torque or angular velocity, which is pertinent to stability in everyday objects like ladders. The lecture then transitions into a discussion on the conditions for a body to remain at rest, emphasizing the need for both force and torque to sum up to zero.
🔧 Conditions for Static Equilibrium and the Seesaw Example
The professor elaborates on the conditions for a body to be in static equilibrium, where not only must the net force be zero, but also the net torque. He uses the seesaw as an example to illustrate how to calculate the forces needed to maintain balance. The seesaw problem involves determining the force F_2 that, when applied at a certain distance from the pivot, balances the weight of a child (F_1) at a different distance.
🤔 Strategy for Solving Torque Problems
Shankar highlights the strategic choice of pivot point when calculating torque. He explains that while one can calculate torque around any point, choosing the point of application of an unknown force makes the problem simpler. This is because the unknown force does not appear in the torque equation when taken through the point of its application, simplifying the solution for the unknown force.
🧷 Application of Torque in Real-World Scenarios
The lecture continues with a more complex problem involving a rod supported by a pivot on a wall. The professor discusses how to calculate the force required to keep the rod from falling. He explains the concept of torque due to gravity and how it can be simplified by considering the center of mass of the rod, assuming a uniform distribution of mass and a constant gravitational force.
🔄 Angular Momentum and the Dynamics of a Rod
Shankar explores the dynamics of a rod with a force applied to it, considering both the vertical and horizontal components of force. He demonstrates how to calculate the force at the pivot and how the horizontal force does not contribute to the torque equation. The discussion then extends to a scenario where a rod is supported by a wire, emphasizing the importance of the angle θ in determining the tension in the wire.
🚍 Torque and Equilibrium in Practical Engineering Problems
The professor delves into the calculation of torque in more complex systems, such as a rod supported by a wire at an angle θ to the wall. He shows how to find the tension in the wire and the forces at the pivot, highlighting the importance of understanding the direction of forces and torques in achieving equilibrium. The lecture concludes with a discussion on the torque equation's utility in simplifying the analysis of these forces.
🎢 The Stability of a Ladder and the Concept of Friction
Shankar addresses the stability of a ladder leaning against a wall, focusing on the minimum angle θ required for the ladder to remain stable. He introduces the concept of static friction μ and how it affects the ladder's stability. The discussion involves writing down the forces acting on the ladder and setting up the torque equation to find the critical angle θ, considering the coefficient of friction and the ladder's length.
🤲 The Right-Hand Rule and the Cross Product in 3D Dynamics
The lecture shifts to three-dimensional dynamics, where the professor introduces the cross product to define torque and angular momentum in 3D space. He explains the right-hand rule for determining the direction of the torque vector and how the cross product is a unique feature of three-dimensional space. The professor also discusses the properties of the cross product and its implications for the dynamics of rotating bodies.
🌀 Angular Momentum as a Vector and Its Conservation
Shankar defines angular momentum for a single point mass as the cross product of the position vector r and the momentum vector p. He shows that the rate of change of angular momentum is equal to the torque, as defined by the cross product of r and the force F. The lecture emphasizes that angular momentum is a vector that can be conserved in a system, provided that the forces between bodies act along the line joining them.
🌌 The Gyroscope and the Phenomenon of Precession
The professor concludes the lecture with a discussion on the gyroscope, a spinning disk on a massless rod. He explains the concept of precession, which is the rotation of the gyroscope's axis when an external torque is applied. The lecture covers how the gyroscope's behavior can be understood through the principles of torque and angular momentum, and how the precessional frequency is determined by the torque and the angular momentum of the gyroscope.
Mindmap
Keywords
💡Torque
💡Angular Velocity
💡Moment of Inertia (I)
💡Static Equilibrium
💡Center of Mass
💡Free Body Diagram
💡Normal Force
💡Friction
💡Cross Product
💡Precession
💡Rigid Body Dynamics
Highlights
Professor Shankar introduces the concept of torque in the context of Newton's law, focusing on the scenario where no external torques are acting on a body.
The discussion on the importance of understanding scenarios where an object has no angular velocity, such as the stability of a ladder.
The condition for a body to remain at rest in a plane, which includes forces in the x and y directions summing to zero and the total torque being zero.
The seesaw problem as a practical example to illustrate the concept of static equilibrium, where the sum of forces and torques equals zero.
The strategic choice of pivot point when calculating torques to simplify the problem, especially when an unknown force like the normal force is involved.
The use of the torque equation to solve for the force needed to support a rod against gravity without involving the normal force.
The application of the concept of torque to more complex problems, such as a rod supported by a pivot and a wall, to find the force required to keep it in equilibrium.
The importance of considering the direction of torque and how it is influenced by the choice of the reference point for rotation.
The principle that the torque around any point is zero if the sum of the forces acting on a body is zero.
The ladder problem, which explores the minimum angle θ for a ladder to remain stable against a wall, considering the coefficient of static friction.
The introduction of torque as a vector quantity in three dimensions, which requires specifying both magnitude and direction.
The use of the right-hand rule to determine the direction of the torque vector in three dimensions.
The concept of angular momentum as a vector, defined as the cross product of the position vector and the momentum vector.
The compatibility of the new definition of angular momentum with the previous scalar definition when applied to a rigid body in two dimensions.
The demonstration that a particle in a straight line also possesses angular momentum, which remains constant if the perpendicular distance from the origin to the particle's velocity vector does not change.
The principle of conservation of angular momentum, which requires that the forces between interacting bodies are along the line joining them.
The behavior of a gyroscope when it is not spinning versus when it is spinning, illustrating the concept of gyroscopic precession.
The calculation of the precessional frequency of a spinning gyroscope, relating the torque to the angular momentum.
Transcripts
Browse More Related Video
College Physics 1: Lecture 25 - Moment of Inertia and Rotational Dynamics

10. Rotations, Part II: Parallel Axis Theorem
9. Rotations, Part I: Dynamics of Rigid Bodies
2022 Live Review 7 | AP Physics 1 | Understanding Torque and Rotational Motion
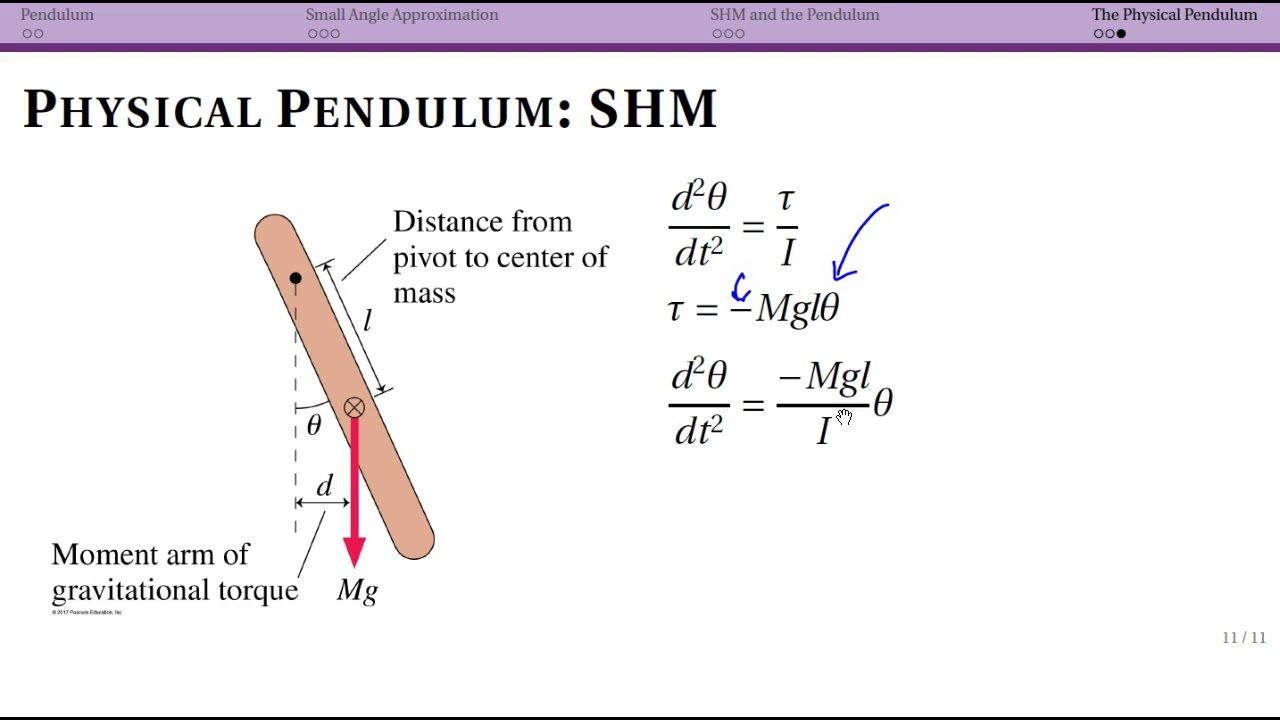
Physical Pendulum
8.01x - Lect 24 - Rolling Motion, Gyroscopes, VERY NON-INTUITIVE
5.0 / 5 (0 votes)
Thanks for rating: