Physical Pendulum
TLDRThis script explores the concept of physical pendulums, contrasting them with simple pendulums. It delves into the rigid body model, where the pivot point is not at the center of mass, leading to a torque-driven rotation. The lecturer introduces the small angle approximation (SMA) for simplifying torque calculations. The discussion then shifts to moments of inertia and angular acceleration, culminating in the derivation of the physical pendulum's motion, which, for small oscillations, can be approximated as simple harmonic motion. The angular frequency is derived, highlighting the cancellation of mass in the formula due to its presence in both the torque and moment of inertia.
Takeaways
- 🔍 The lecture distinguishes between the simple pendulum and the physical pendulum, highlighting the difference in modeling approaches.
- 📐 The simple pendulum is modeled as a point mass on a massless string, whereas the physical pendulum is modeled using a rigid body with a pivot point not at the center of mass.
- 🌀 The physical pendulum's motion involves torque, which is the product of the gravitational force and the perpendicular distance from the pivot to the center of mass.
- 📉 The torque on a physical pendulum changes as the object rotates, requiring the use of trigonometric functions to describe its motion accurately.
- ⚖️ The small angle approximation (sMA) simplifies the analysis by assuming that the sine of the angle is approximately equal to the angle itself, applicable for small oscillations.
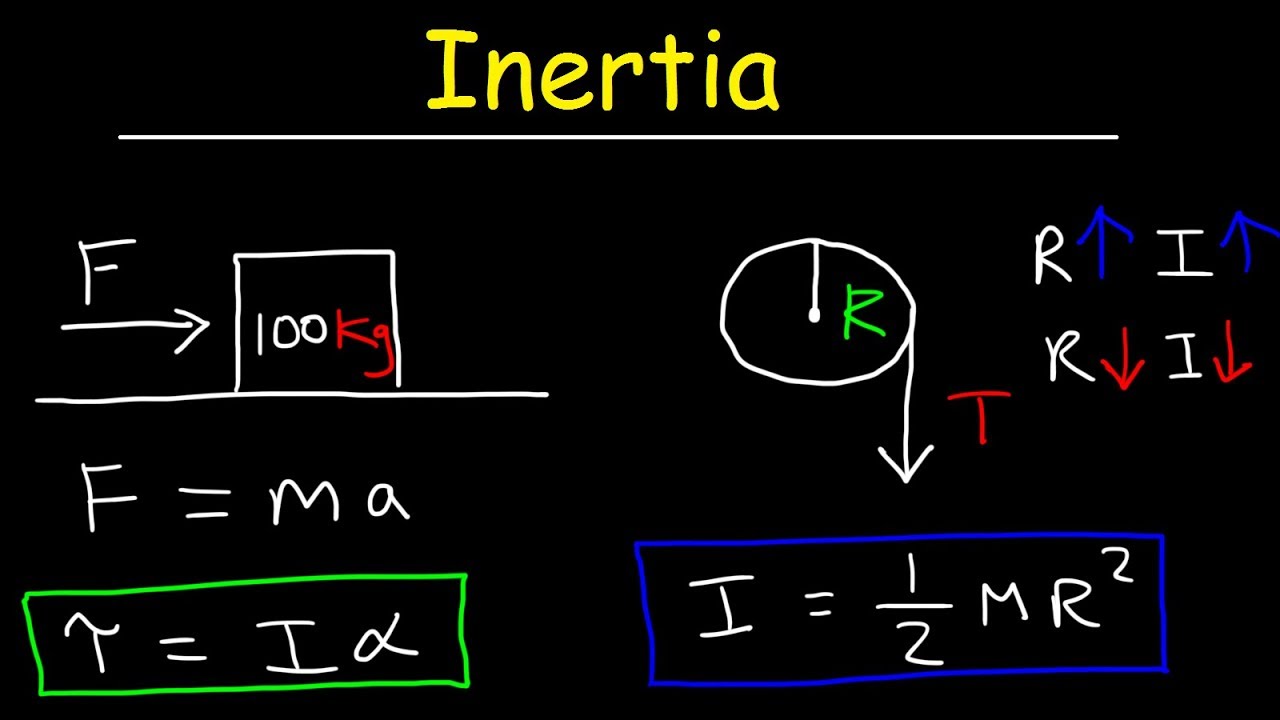
- 🔄 Angular acceleration is related to torque and moments of inertia, and it is the second derivative of the angle with respect to time.
- 📚 The physical pendulum's motion can be modeled by a differential equation, which is solvable for small angles to describe simple harmonic motion.
- 📉 The restoring force in a physical pendulum is linear with respect to the angular displacement, allowing it to be modeled as simple harmonic motion under small angle conditions.
- 🎓 The angular frequency (ω) of the physical pendulum is determined by the square root of the ratio of the product of mass, gravitational constant, and distance between pivot point and center of mass, to the moments of inertia.
- 🔍 The moment of inertia is generally a function of the object's shape and mass, often expressed as a constant times mass times some characteristic length squared.
- 🌐 The mass of the object cancels out in the formula for angular frequency, indicating that the motion is influenced by the geometry of the object and its distribution of mass.
Q & A
What is the difference between a simple pendulum and a physical pendulum?
-A simple pendulum is modeled as a point mass on a massless string, with the pivot point directly above the center of mass, making it ideal for small oscillations. A physical pendulum, on the other hand, is based on a rigid body model where the pivot point is not at the center of mass, causing the object to rotate due to gravity acting at the center of mass.
Why is the particle model used for the simple pendulum?
-The particle model is used for the simple pendulum because it simplifies the system to a point mass at a fixed distance from the pivot point, allowing for easier calculations and analysis of small oscillations.
What is torque and how does it relate to the physical pendulum?
-Torque is the rotational equivalent of force and is the product of the force and the perpendicular distance from the pivot point to the line of action of the force. In the context of a physical pendulum, the torque is due to the force of gravity acting at the center of mass, causing the object to rotate around the pivot point.
What is the significance of the moment arm (D) in the context of torque for a physical pendulum?
-The moment arm (D) is the perpendicular distance from the pivot point to the line of action of the gravitational force acting at the center of mass. It is crucial in calculating the torque because it determines the effectiveness of the gravitational force in causing rotation.
Why is a minus sign used when calculating torque in the context of a physical pendulum?
-The minus sign is used because the gravitational force acts in the opposite direction of the defined positive direction for the moment arm (D). Since clockwise rotation is considered negative, the minus sign indicates the direction of the torque.
What is the small angle approximation and why is it used in the analysis of a physical pendulum?
-The small angle approximation is an assumption that the sine of an angle (theta) is approximately equal to the angle itself when the angle is small. It simplifies the calculations by linearizing the sine function, making it easier to analyze the motion of a physical pendulum during small oscillations.
How is angular acceleration related to torque in the context of a physical pendulum?
-Angular acceleration is the rate of change of angular velocity with respect to time. It is related to torque through the moment of inertia (I) of the object, where the torque (τ) is equal to the moment of inertia times the angular acceleration (α), expressed as τ = Iα.
What conditions must be met for a physical pendulum to exhibit simple harmonic motion?
-For a physical pendulum to exhibit simple harmonic motion, it must have a linear restoring force that is proportional to the displacement from the equilibrium position and acts in the opposite direction. This typically occurs during small oscillations where the small angle approximation is valid.
How is the angular frequency (ω) of a physical pendulum determined?
-The angular frequency (ω) of a physical pendulum is determined by the square root of the ratio of the product of the gravitational constant (g), the length between the pivot point and the center of mass (L), and a numerical constant related to the object's shape, all divided by the moment of inertia (I).
What is the importance of the moment of inertia in the analysis of a physical pendulum?
-The moment of inertia is a measure of an object's resistance to rotational motion. It is crucial in analyzing the physical pendulum because it relates the torque to the angular acceleration, which is necessary for determining the motion of the pendulum.
Why does the mass (M) cancel out when determining the angular frequency of a physical pendulum?
-The mass (M) cancels out because it appears in both the gravitational force (mg) and the moment of inertia (I, which often has a term like M*L^2). Since the mass is a common factor in both, it cancels out during the calculation of the angular frequency, leaving a relationship that depends on the geometry of the object and the distance L.
Outlines
🔍 Introduction to Physical and Simple Pendulums
The script begins by introducing the concept of a physical pendulum, contrasting it with the simpler pendulum model. The simple pendulum is described as a mass on a massless string, with the mass being small and having a significant weight, creating a point mass model. The physical pendulum, however, is based on a rigid body model with a pivot point not at the center of mass, leading to a rotation due to gravity acting at the center of mass. The explanation delves into torque, moment arms, and the importance of considering the small angle approximation for the physical pendulum's motion, which is essential for simplifying the model to resemble simple harmonic motion.
📚 Analyzing the Physical Pendulum's Motion
This paragraph delves deeper into the dynamics of the physical pendulum, focusing on the angular acceleration and its relation to torque and moments of inertia. It explains how the torque from gravity can be expressed in terms of the angular displacement (theta) and how this leads to a differential equation that can be solved to understand the pendulum's motion. The paragraph highlights the importance of recognizing a linear restoring force for the motion to be modeled as simple harmonic. It also discusses the solution to the differential equation, which results in a sinusoidal form of motion, and explains how the angular frequency of the pendulum is derived from the physical properties of the system, such as mass, gravitational constant, and the distance between the pivot point and the center of mass.
Mindmap
Keywords
💡Physical pendulum
💡Simple pendulum
💡Rigid body model
💡Torque
💡Moment of inertia
💡Angular acceleration
💡Small angle approximation
💡Simple harmonic motion
💡Differential equation
💡Angular frequency
Highlights
Introduction to the physical pendulum and its distinction from the simple pendulum.
Explanation of the simple pendulum model with a point mass and massless string.
Description of the physical pendulum as a rigid body model with a pivot point not at the center of mass.
Discussion on the importance of using the rigid body model for physical pendulums due to gravity's effect on rotation.
Introduction of torque as a key concept in analyzing the physical pendulum's motion.
Different ways of conceptualizing torque, including the distance perpendicular to the force applied.
Explanation of the torque formula involving the force of gravity, moment arm, and the position of the center of mass.
Clarification on the negative sign in torque calculation due to the direction of gravity and coordinate definition.
Expansion of torque in terms of theta using the small angle approximation for simplification.
Introduction of the small angle approximation (SMA) for analyzing small oscillations.
Relating torque to moments of inertia and angular acceleration in the context of the physical pendulum.
Determination of angular acceleration as the second derivative of angle with respect to time.
Analysis of the linear restoring force in the context of simple harmonic motion for the physical pendulum.
Identification of the conditions under which a physical pendulum can be modeled as simple harmonic motion.
Derivation of the differential equation for the physical pendulum's motion using torque and moments of inertia.
Solution of the differential equation using sinusoidal form for the physical pendulum's motion.
Calculation of the angular frequency for the physical pendulum's motion, emphasizing the role of initial conditions.
Discussion on the cancellation of mass in the formula for the physical pendulum's motion due to its inclusion in moments of inertia.
Final conclusion on the physical pendulum exhibiting simple harmonic motion under small angle approximations.
Transcripts
Browse More Related Video
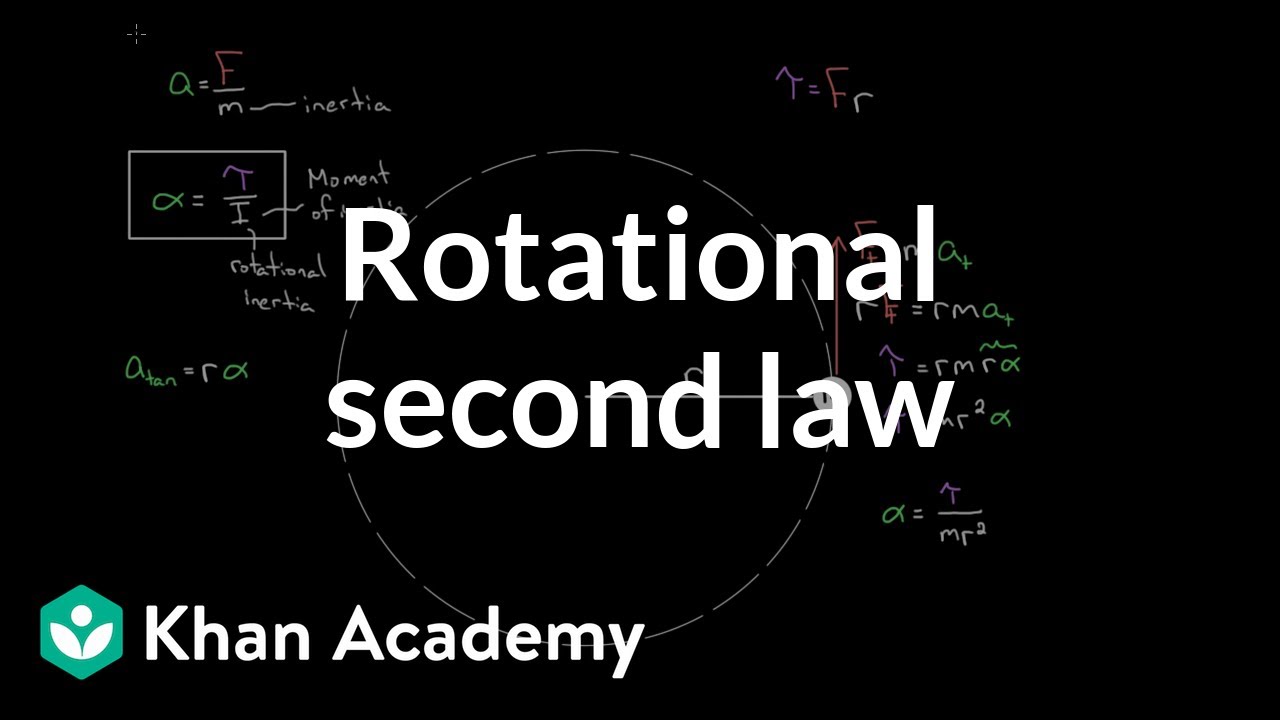
Rotational version of Newton's second law | Physics | Khan Academy
College Physics 1: Lecture 25 - Moment of Inertia and Rotational Dynamics
17. Simple Harmonic Motion
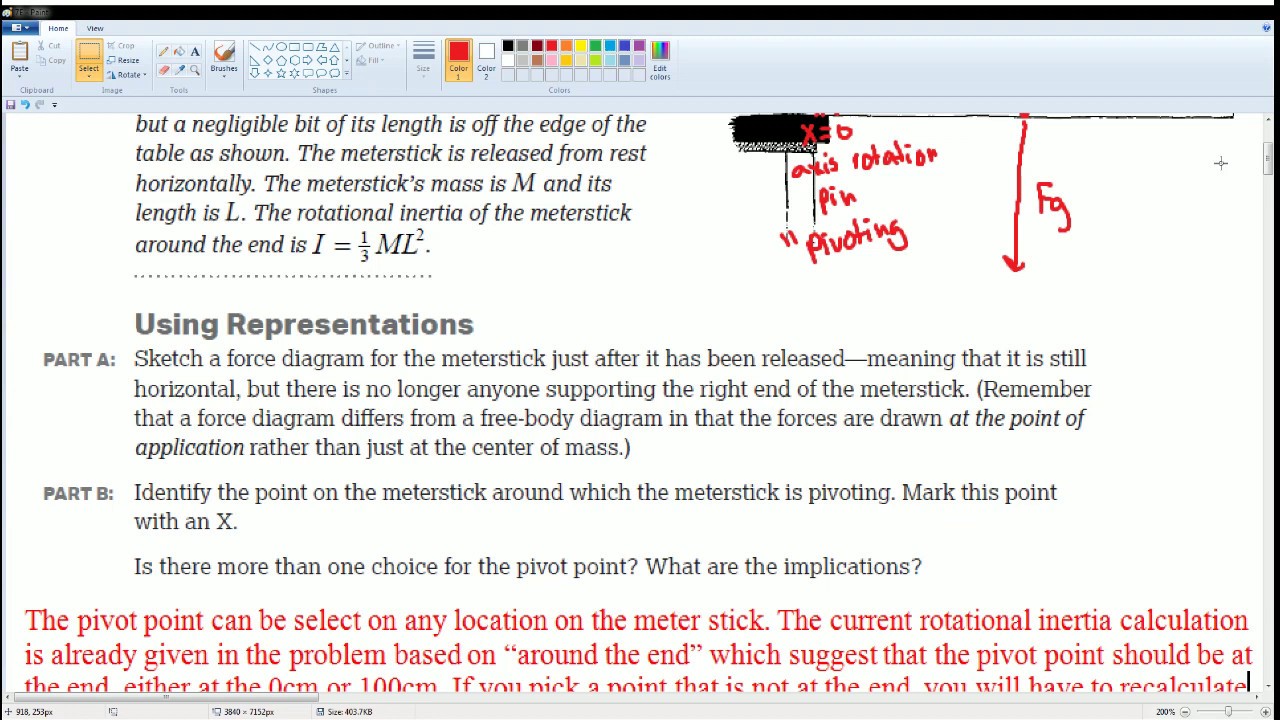
AP Physics Workbook 7.E Rotation
Inertia - Basic Introduction, Torque, Angular Acceleration, Newton's Second Law, Rotational Motion

Physics 15 Torque Fundamentals (13 of 13) Torque and Angular Acceleration
5.0 / 5 (0 votes)
Thanks for rating: