2. Vectors in Multiple Dimensions
TLDRIn this lecture, Professor Ramamurti Shankar discusses the kinematics of a particle moving in one and two dimensions, emphasizing the importance of calculus for understanding motion. He introduces the concept of vectors, their properties, and operations, particularly in relation to motion along the x and y axes. The professor also explores the transformation of vectors under different coordinate systems and delves into the application of vector calculus in determining the position, velocity, and acceleration of a moving particle. The lecture concludes with practical examples of projectile motion and the significance of vector components in describing an object's trajectory.
Takeaways
- 📚 The fate of a particle with constant acceleration can be described by a set of equations involving initial position, initial velocity, and acceleration.
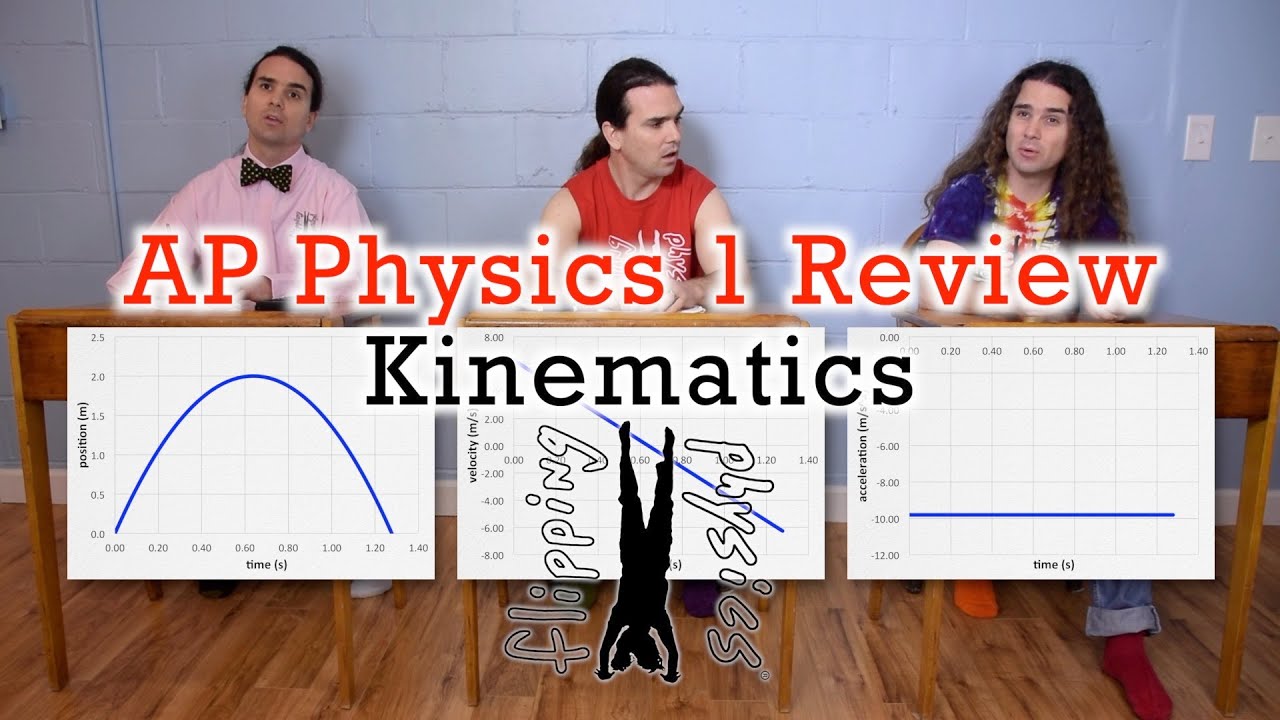
- 📈 In one-dimensional motion, the position of a particle is given by x(t) = x_0 + v_0t + 1/2 at^2, where x_0 is the initial position, v_0 is the initial velocity, a is the acceleration, and t is time.
- 🔄 For vertical motion under gravity, the acceleration is -g, and the initial conditions are crucial to determine the location of the particle at any given time.
- 📊 The velocity of a particle at time t can be found by v(t) = v_0 + at, which is derived from the initial velocity and the rate of change of velocity due to acceleration.
- 🔢 The relationship between velocity and time allows for the calculation of displacement and velocity in terms of initial conditions and acceleration.
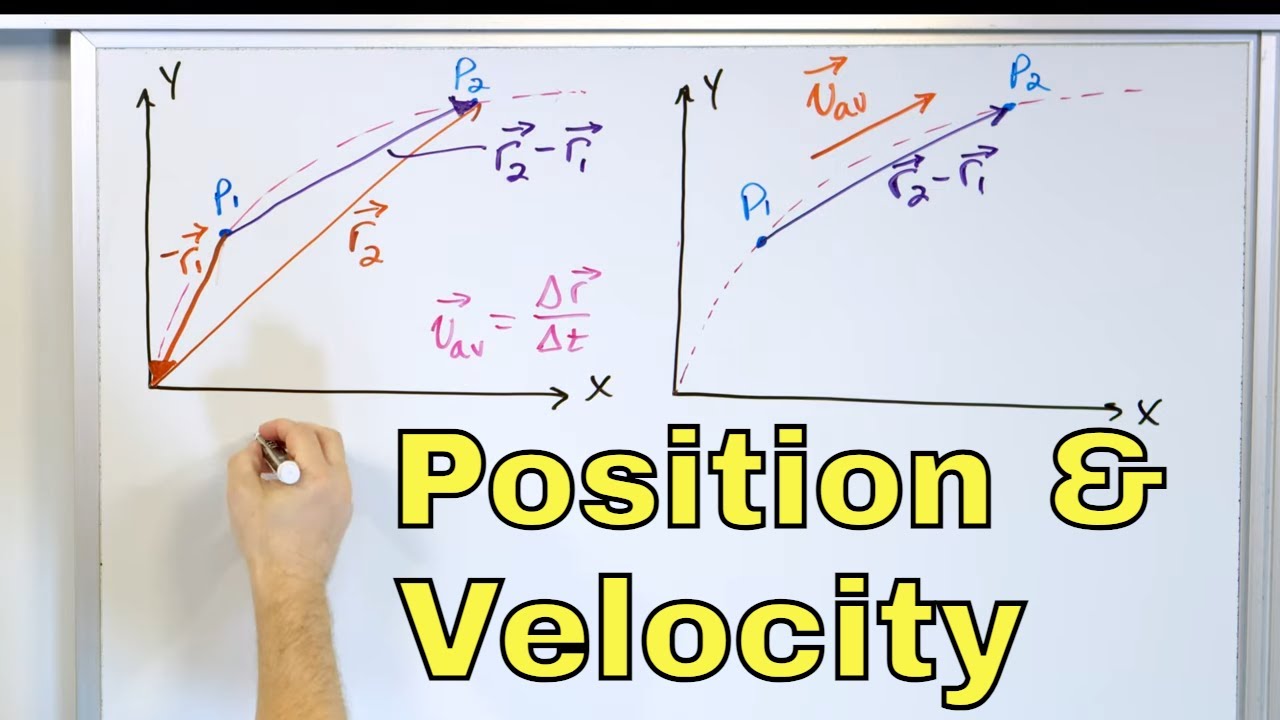
- 🌟 In two-dimensional motion, the position and velocity of a particle are described by vectors, with components along the x and y axes.
- 🔄 The concept of vectors is essential for describing displacement, direction, and magnitude in two-dimensional space, and vector addition follows the parallelogram rule.
- 📐 Unit vectors (i and j) are used to express any vector in terms of its x and y components, and these components can be transformed between different coordinate systems through trigonometric relationships.
- 🔄 The velocity and acceleration vectors of a particle moving in a circle have specific characteristics: the velocity is tangent to the circle, and the acceleration is directed towards the center of the circle.
- 🚀 Projectile motion can be analyzed by separating the horizontal and vertical components of motion, with the range being maximized when the projectile is launched at a 45-degree angle to the horizontal.
- 📖 The script emphasizes the importance of understanding the underlying principles of physics and mathematics rather than just memorizing formulas.
Q & A
What is the significance of the two equations mentioned by Professor Ramamurti Shankar at the beginning of the transcript?
-The two equations provided by Professor Ramamurti Shankar describe the motion of a particle moving in one dimension with constant acceleration. They are fundamental to understanding the kinematics of the particle, as they allow us to calculate its position and velocity at any given time.
What does the term 'initial conditions' refer to in the context of the particle's motion?
-In the context of the particle's motion, 'initial conditions' refer to the initial location (x_0) and initial velocity (v_0) of the particle. These values are crucial as they, along with the acceleration (a), determine the future position and velocity of the particle.
How does the concept of acceleration relate to the motion of a particle?
-Acceleration (a) is the rate of change of velocity with respect to time. In the motion of a particle, it determines how quickly the particle's velocity changes. A constant acceleration implies a consistent change in velocity over time, which, combined with the initial conditions, dictates the particle's trajectory.
What is the significance of the vector v(t) = v_0 + at in the context of the particle's motion?
-The vector v(t) = v_0 + at represents the velocity of the particle at time t. It takes into account the initial velocity (v_0) and the constant acceleration (a) over time (t). This vector equation shows how the particle's velocity changes over time due to the acceleration.
How does the equation v^(2) = v_0^(2) + 2a(x-x_0) relate to the conservation of energy in the context of the particle's motion?
-The equation v^(2) = v_0^(2) + 2a(x-x_0) is derived from the principles of kinematics and does not directly relate to the conservation of energy. However, it does describe the relationship between the kinetic energy (which is proportional to the square of the velocity), the initial kinetic energy, and the work done by the acceleration on the particle as it moves from its initial position (x_0) to a new position (x).
What is the purpose of the textbook 'Basic Training in Mathematics' recommended by Professor Ramamurti Shankar?
-The textbook 'Basic Training in Mathematics' is recommended for students to refresh and solidify their understanding of calculus, which is essential for grasping the concepts of physics, especially in understanding the kinematics of particles and other dynamical systems.
How does the introduction of vectors in two dimensions (2D) differ from their use in one dimension (1D)?
-In one dimension, motion can be described by a single coordinate (x) and its change over time. In two dimensions, however, a pair of coordinates (x, y) is needed to describe the position of an object, which is more conveniently represented as a vector. Vectors in 2D capture both the magnitude and direction of displacement, which is necessary for accurately describing motion in a plane.
What is the significance of unit vectors in the context of vector addition?
-Unit vectors are vectors of length one, pointing along the coordinate axes (I along x and J along y). They are significant because any vector in 2D can be expressed as a linear combination of these unit vectors. This allows for the addition of vectors to be performed algebraically by adding their corresponding components along each axis.
How does the concept of a 'null vector' or 'zero vector' relate to the vector addition described in the transcript?
-The 'null vector' or 'zero vector' is a vector with no magnitude (length) and no specific direction. When added to any other vector, it does not change the sum because it represents no displacement. In the context of vector addition, the null vector serves as the identity element, similar to the number 0 in arithmetic addition.
What is the significance of the vector equation A = B in terms of their components?
-The vector equation A = B signifies that both vectors have the same magnitude and direction. In terms of their components, this means that the x-component of A (Ax) must equal the x-component of B (Bx), and the y-component of A (Ay) must equal the y-component of B (By). This exact match is necessary for the vectors to be considered equal.
How does the concept of vector components transform when switching between different coordinate systems?
-When switching between different coordinate systems, the components of a vector transform based on the orientation of the new coordinate system relative to the original one. This transformation is described by the angles between the axes of the two systems. The new components (primed) can be calculated from the old components using trigonometric relations that involve the angle of rotation between the coordinate systems.
What is the significance of the invariant properties of vectors when changing coordinate systems?
-The invariant properties of vectors, such as their length, remain unchanged regardless of the coordinate system being used. This is significant because it ensures that physical quantities derived from vectors, like the distance between two points or the magnitude of a force, are consistent and do not depend on the choice of coordinate system.
Outlines
📚 Introduction to Kinematics and Basic Equations
Professor Ramamurti Shankar begins the lecture by summarizing the previous session's discussion on the motion of a particle in one dimension. He emphasizes the importance of understanding the basic equations that describe the particle's location and velocity over time. The professor introduces the concept of initial conditions (x_0 and v_0) and explains how they, combined with the constant acceleration (a), can predict the future behavior of the particle. The discussion then transitions to the application of these principles in more complex scenarios, such as vertical motion under gravity, highlighting the necessity of knowing both the initial conditions and the acceleration to fully describe the motion.
🌐 Motion in Higher Dimensions and Vectors
The lecture continues with an exploration of motion in higher dimensions, specifically two and three dimensions. The professor explains that while we live in a three-dimensional world, understanding two-dimensional motion is crucial as it introduces the concept of vectors. Vectors are used to describe displacement, incorporating both magnitude and direction. The professor discusses the addition of vectors and introduces the idea of unit vectors (i and j), which are used to express any vector in terms of its components along the x and y axes. The lecture also touches on the concept of a null vector and the multiplication of vectors by scalars, setting the foundation for further discussions on vector operations.
🔢 Vector Addition and the Concept of Zero Vector
This paragraph delves deeper into the rules of vector addition, emphasizing the commutative nature of vector addition but noting that the composition of vector operations is not always commutative. The professor introduces the zero vector, which has no magnitude and does not affect the vector to which it is added. The concept of scalar multiplication is further explained, with examples illustrating how multiplying a vector by a number stretches or compresses it proportionally. The idea of a negative vector is also introduced, which is essentially the original vector pointing in the opposite direction.
🔄 Rotation of Axes and Transforming Vector Components
The professor discusses the transformation of vector components when switching between different coordinate systems. By introducing primed unit vectors (i' and j'), the lecture explains how the components of a vector (Ax and Ay) change when a new set of axes is used. The relationship between the old and new components is derived using trigonometry, highlighting the importance of understanding how the orientation of axes affects the representation of vectors. The invariance of the vector's length under coordinate transformations is also emphasized, reinforcing the concept of an invariant quantity.
🚀 Derivatives of Vectors and Velocity in Circular Motion
The lecture introduces the concept of taking derivatives of vectors with respect to time, leading to the definition of the velocity vector. By differentiating the position vector, the velocity vector is obtained, which describes the rate of change of the position. The professor then presents a specific example of a particle moving in a circular path, using trigonometric functions to express the position vector. The velocity vector is derived from this motion, and its components are analyzed. The lecture concludes with the calculation of the tangential speed of the particle in circular motion and introduces the concept of angular velocity (ω), which characterizes the rate of change of the angle over time.
📐 Analysis of Circular Motion and Acceleration
The professor continues the discussion on circular motion by analyzing the acceleration of a particle moving in a circle. By taking the second derivative of the position vector, the acceleration vector is found to be directed towards the center of the circle, with a magnitude of v^(2)/r, where v is the tangential speed and r is the radius of the circle. This result is significant as it shows that even though the speed is constant, there is an acceleration due to the continuous change in direction. The concept is further explained with the help of a car moving on a racetrack, emphasizing that circular motion inherently involves acceleration towards the center of the circle.
🌟 Relating Position, Velocity, and Acceleration in Motion
The lecture addresses the relationship between a particle's position, velocity, and acceleration in motion. The professor explains that the position vector can be used to derive both the velocity and acceleration vectors through differentiation. The example of a particle moving in a circle is used to illustrate this, with the acceleration vector found to point towards the center of the circle. The lecture also touches on the concept of velocity addition, explaining how the velocity of an object in a moving frame can be found by adding the frame's velocity relative to a stationary observer. This principle is applied to the scenario of a particle moving in a circle, showing that the acceleration is always directed towards the center of the circle, regardless of the particle's speed.
🎯 Projectile Motion and Optimal Launch Angles
The lecture concludes with a discussion on projectile motion, focusing on the optimal angle for launching a projectile to achieve maximum range. The professor presents the equations of motion for a projectile launched at an angle θ and explains how to find the range and the time of flight. The importance of understanding trigonometry is highlighted in deriving the optimal launch angle, which is found to be 45 degrees. The lecture emphasizes the importance of not memorizing formulas but instead understanding the underlying principles and deriving the necessary equations from first principles.
📖 Reflections on Physics Problems and Real-World Applications
In the final paragraph, the professor reflects on the presentation of physics problems and their real-world applications. He critiques the tendency of textbooks to embellish problems with unrealistic scenarios, such as a horse inside a railway carriage, to make them more engaging. The professor argues that while such examples can sometimes be helpful, they can also be distracting and increase the cost of textbooks without adding substantial value. He emphasizes the importance of understanding the fundamental concepts and being able to apply them to various situations, whether they involve point particles or more complex systems like a horse.
Mindmap
Keywords
💡Particle
💡Acceleration
💡Vector
💡Derivative
💡Kinematics
💡Projectile Motion
💡Trigonometry
💡Coordinate System
💡Velocity
💡Centripetal Force
💡Calculus
Highlights
The discussion begins with Professor Shankar summarizing the kinematics of a particle moving in one dimension with constant acceleration, using two fundamental equations.
The initial position (x_0) and initial velocity (v_0) of an object are crucial parameters in determining its motion under constant acceleration.
The velocity of a particle at any time can be found by adding its initial velocity to the product of acceleration and time.
The concept of vectors is introduced as a convenient way to describe motion in higher dimensions, such as two-dimensional motion.
Unit vectors (I and J) are defined along the x and y axes, and any vector can be expressed as a linear combination of these unit vectors.
The addition of vectors follows a commutative law, meaning the order of addition does not affect the result.
The zero vector (null vector) has no magnitude and can be thought of as not affecting the sum when added to any other vector.
The concept of scalar multiplication of vectors is introduced, where multiplying a vector by a scalar stretches or compresses the vector by that factor.
The vector equation A = B implies that both the x and y components of the vectors must be equal for the vectors to be considered equal.
The transformation of vector components between different coordinate systems is discussed, highlighting the importance of understanding how components change with the choice of axes.
The length of a vector is invariant under coordinate transformations, meaning it remains the same regardless of the chosen axes.
The velocity vector of an object is defined as the limit of the change in position vector (Δr) divided by the change in time (Δt) as Δt approaches zero.
The acceleration vector is derived as the second derivative of the position vector with respect to time, indicating the rate of change of velocity.
An example of circular motion is analyzed, where the particle moves in a circle with a constant speed, and the angular velocity (ω) is defined.
The tangential speed of a particle in circular motion is given by ωr, where ω is the angular velocity and r is the radius of the circle.
The centripetal acceleration of a particle in circular motion is given by v^(2)/r, where v is the tangential speed and r is the radius of the circle.
The concept of relative motion is discussed, where the velocity of an object with respect to a moving reference frame is the sum of the object's velocity with respect to a stationary reference frame and the moving frame's velocity with respect to the stationary frame.
The problem of projectile motion is introduced, with a focus on understanding the motion of an object launched with an initial velocity at a certain angle to the horizontal.
The optimal angle for maximum range in projectile motion is found to be 45 degrees, derived from the trigonometric relationship sin 2θ.
The text concludes with a discussion on the practical applications and theoretical implications of the concepts learned, emphasizing the importance of understanding underlying principles rather than just memorizing formulas.
Transcripts




5.0 / 5 (0 votes)
Thanks for rating: