Video 91 - Frenet Formulas
TLDRThis video, part of a series on tensor calculus, delves into the derivation of the Frenet formulas, essential for defining an orthonormal basis in the tangent space of a curve. The script explains how unit vectors, such as the tangent and principal normal vectors, are orthogonal and introduces the binormal vector and torsion. It further demonstrates that these vectors form an orthonormal basis applicable to any dimension, illustrating the process with a spiral curve example and highlighting the broader applicability of the Frenet formulas in higher dimensions.
Takeaways
- 📚 The video is part of a series on tensor calculus and focuses on deriving the Frenet formulas, which are essential for defining an orthonormal basis in the context of curves.
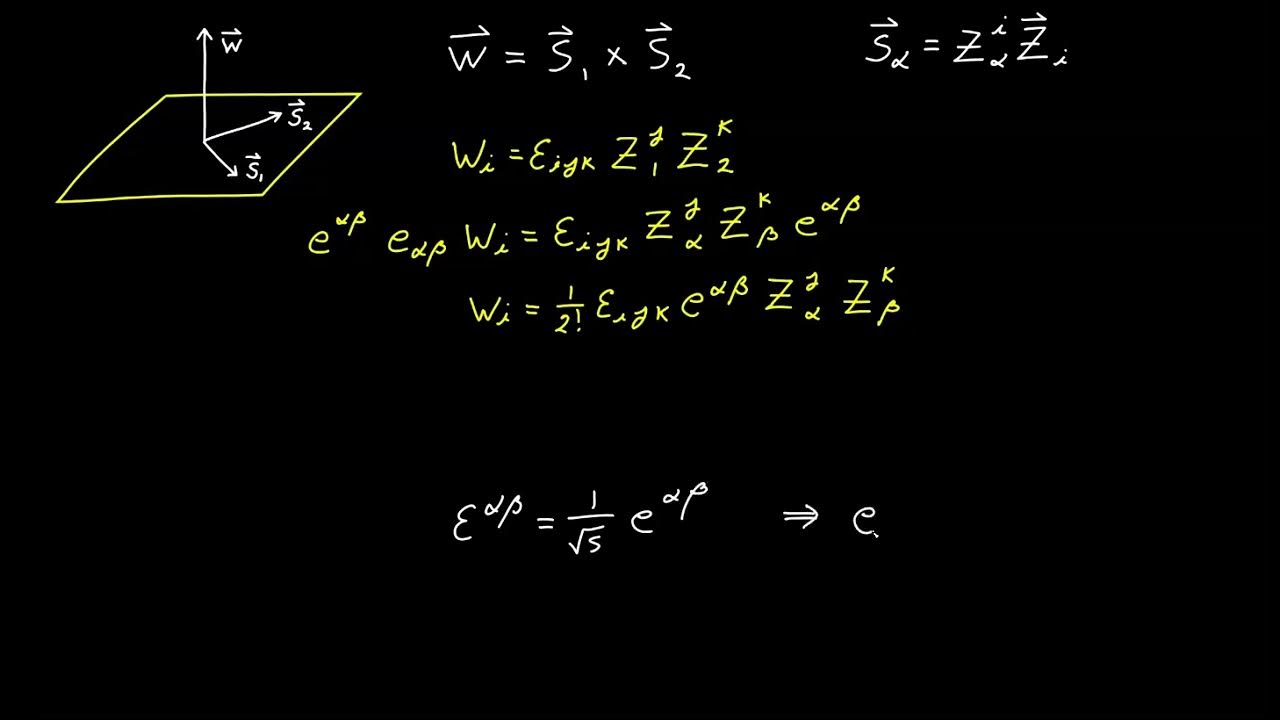
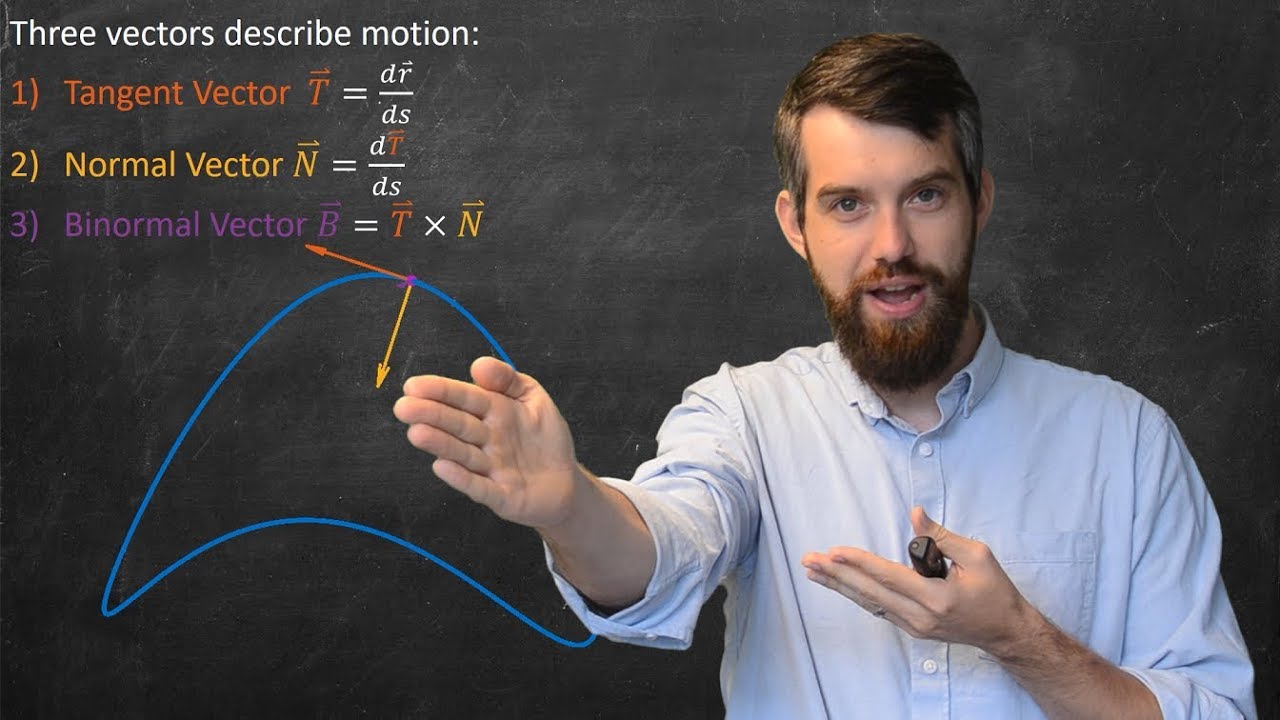
- 🧭 The Frenet formulas consist of three relationships that define the unit tangent vector (s-hat), the principal normal vector (p-hat), and the binormal vector (q-hat), along with their associated scalar values for curvature (kappa) and torsion (tau).
- ⊥ The unit vectors s-hat and p-hat are shown to be orthogonal to each other, a property that is used repeatedly throughout the derivation process.
- 🔄 A general property is highlighted: any vector with constant magnitude is orthogonal to its derivative, which is used to establish relationships between the unit vectors.
- 📈 The script demonstrates the derivation of the Frenet formulas step by step, including taking derivatives with respect to the arc length parameter 's' and using the product rule.
- 🔍 The video explains how the dot product is used to show the orthogonality between the unit vectors and how the curvature and torsion are related to the rate of change of these vectors.
- 🆕 The binormal vector q-hat is introduced as a new unit vector that is orthogonal to both s-hat and p-hat, completing the orthonormal basis for the curve's tangent space.
- 📉 The torsion (tau) is defined as a scalar factor representing the magnitude of the rate at which the principal normal vector (p-hat) changes direction, indicating the 'twisting' of the curve.
- 🔢 The script involves complex algebraic manipulations to derive expressions for the curvature, principal normal, binormal vector, and torsion for a given curve.
- 📊 The Frenet formulas are shown to be applicable not only in three dimensions but also extendable to higher-dimensional Euclidean spaces, providing a general pattern for constructing an orthonormal basis in any number of dimensions.
- 📝 The video concludes by emphasizing that the Frenet formulas are valid tensor equations, as they are based on invariant expressions and can be adapted to any coordinate system using the covariant derivative.
Q & A
What is the main topic of this video?
-The main topic of this video is the derivation of the Frenet formulas, which are used to define an orthonormal basis equivalent to the tangent space when working with surfaces.
What are the three relationships collectively known as the Frenet formulas?
-The three relationships known as the Frenet formulas describe the relationship between the unit tangent vector (s-hat), the principal normal vector (p-hat), and the binormal vector (q-hat) along a curve.
Why are the vectors s-hat and p-hat orthogonal to each other?
-The vectors s-hat and p-hat are orthogonal because the dot product of a vector with itself is constant when its magnitude is fixed, and taking the derivative of this dot product with respect to s results in zero, indicating orthogonality.
What is the physical interpretation of the curvature (kappa) in the context of the Frenet formulas?
-The curvature (kappa) is a scalar factor that measures how quickly the direction of the unit tangent vector (s-hat) is changing as the point moves along the curve.
What is the binormal vector (q-hat) and why is it significant?
-The binormal vector (q-hat) is a unit vector that is orthogonal to both the unit tangent vector (s-hat) and the principal normal vector (p-hat). It is significant because, along with s-hat and p-hat, it forms an orthonormal basis that can represent any vector in the ambient space.
What is the torsion (tau) and what does it measure?
-The torsion (tau) is a scalar factor that represents the magnitude of the rate at which the principal normal vector (p-hat) changes direction as the point moves along the curve. It measures the 'twisting' or 'rotation' of the curve.
How are the Frenet formulas extended to higher dimensions?
-The Frenet formulas can be extended to higher dimensions by adding additional unit vectors and scalar factors that maintain the orthonormality of the basis. The pattern of the formulas can be iterated to accommodate any number of dimensions.
What is the significance of the orthonormal basis in higher dimensions as derived from the Frenet formulas?
-The orthonormal basis in higher dimensions, derived from the Frenet formulas, allows for the representation of vectors in any direction within an n-dimensional Euclidean space, similar to how the tangent space relates to surfaces in three dimensions.
How does the script demonstrate that the Frenet formulas are valid tensor equations?
-The script shows that the Frenet formulas are valid tensor equations by explaining that the derivatives with respect to arc length can be replaced with covariant derivatives, making the expressions invariant and adaptable to any coordinate system.
What is the practical application of understanding the Frenet formulas and the orthonormal basis in the context of curves and surfaces?
-Understanding the Frenet formulas and the orthonormal basis is crucial for analyzing the geometric properties of curves and surfaces, such as curvature and torsion, and for representing vectors in the ambient space of any dimension.
Outlines
📚 Introduction to Frenet Formulas and Orthonormal Basis
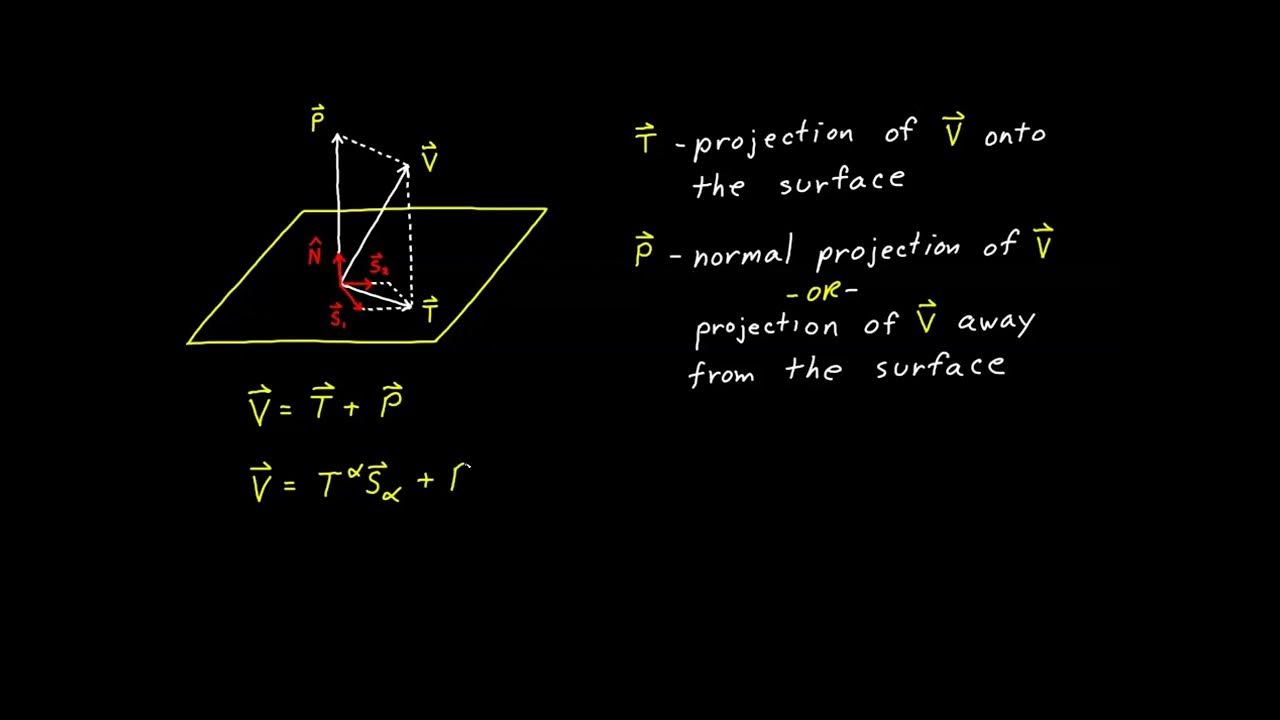
This paragraph introduces the Frenet formulas, which are essential for defining an orthonormal basis equivalent to the tangent space when working with surfaces. The Frenet formulas relate to the unit tangent vector (s-hat) and the principal normal vector (p-hat), both of which are orthogonal. The paragraph explains how the dot product of a vector with itself must be constant if its magnitude is fixed, leading to the conclusion that any vector is orthogonal to its derivative if its magnitude remains constant. The process of deriving the orthogonality between s-hat and p-hat using the dot product is also detailed.
🔍 Derivation of the Second Frenet Formula and Binormal Vector
The second paragraph delves into the derivation of the second Frenet formula, which introduces a new vector quantity that is perpendicular to both the unit tangent vector and the principal normal. This leads to the definition of the binormal vector (q-hat) and the scalar factor of torsion (tau). The paragraph explains how the derivative of p-hat with respect to s, plus the curvature (kappa) times s-hat, equals tau times q-hat. The process of subtracting the torsion term from the equation to derive the second Frenet formula is also described, establishing that the binormal vector is orthogonal to both s-hat and p-hat, thus completing the orthonormal basis.
📈 Applying Frenet Formulas to a Sample Curve and Higher Dimensions
In this paragraph, the application of the Frenet formulas to a sample curve is discussed, including the calculation of the binormal vector and torsion. The process involves taking derivatives with respect to the arc length 's' and using the curvature and the unit tangent vector to find these new quantities. The paragraph also extends the discussion to higher dimensions, showing how the Frenet formulas can be adapted to provide an orthonormal basis for spaces of any number of dimensions. The recurring formula for the general solution in higher dimensions is introduced, illustrating the pattern that can be followed to develop unit vectors for an n-dimensional Euclidean space.
🔬 Detailed Calculation of Torsion and Binormal Vector for a Spiral
This paragraph provides a detailed walkthrough of calculating the torsion and binormal vector for a specific spiral curve. It involves finding the derivative of the principal normal with respect to 's', multiplying the curvature by the unit tangent vector, and adding this product to the derivative of p-hat with respect to 's'. The algebraic manipulation required to simplify the expression and find the final form of the binormal vector and torsion is described. The paragraph emphasizes the complexity of the calculations and the need to understand the process thoroughly.
🌐 Generalization of Frenet Formulas for Higher Dimensions
The fifth paragraph generalizes the Frenet formulas for higher dimensions, starting with a restructuring of the original equations to reveal a pattern that can be applied to any number of dimensions. The paragraph outlines the solution for four and five dimensions, showing how additional unit vectors and scalar factors can be introduced to maintain the orthonormal basis. The recurring formula for the general solution in higher dimensions is presented, which can be iterated to produce the necessary equations for an ambient space of any dimension.
🎯 Conclusion: Validity of Frenet Formulas as Tensor Equations
The final paragraph concludes the discussion by affirming the validity of the Frenet formulas as tensor equations. It explains that the relationships are based on derivatives with respect to the arc length 's', which can be broken down using the chain rule and are equivalent to the covariant derivative. The paragraph clarifies that the Frenet formulas are invariant expressions that can be adapted to any coordinate system, making them valid tensor equations. The video script wraps up with a look forward to the next topic, which will explore how curves are embedded in a two-dimensional surface.
Mindmap
Keywords
💡Frenet Formulas
💡Orthonormal Basis
💡Tangent Space
💡Curvature (kappa)
💡Torsion
💡Unit Tangent Vector
💡Principal Normal Vector
💡Binormal Vector
💡Dot Product
💡Tensor Equations
Highlights
Introduction of the Frenet formulas and their role in defining an orthonormal basis equivalent to the tangent space for curves.
Explanation of the relationship between the unit vectors s-hat and p-hat, and their orthogonality.
Derivation of the first Frenet formula using the dot product and the product rule.
General property that a vector is orthogonal to its derivative if its magnitude is constant.
Proof that s-hat and p-hat are orthogonal through dot product analysis.
Derivation of the second Frenet formula involving the curvature kappa.
Introduction of the binormal vector q and the scalar factor tau representing torsion.
Orthogonality of the binormal vector q to both the unit tangent vector s-hat and the principal normal p-hat.
Establishment of an orthonormal basis using three mutually orthogonal unit vectors.
Practical application of the Frenet formulas to a sample curve to derive the binormal vector and torsion.
Complex algebraic manipulation involved in finding the binormal vector and torsion for a spiral curve.
Calculation of the magnitude of the binormal vector's derivative to find the torsion.
Visualization of the orthonormal basis in three dimensions and its relation to the ambient space.
Extension of the Frenet formulas to higher dimensions and their general solution as a recurring formula.
Proof that the Frenet formulas provide an orthonormal basis for any number of dimensions.
Demonstration of the general solution for five dimensions using the recurring formula.
Validation of the Frenet formulas as valid tensor equations invariant under coordinate transformations.
Conclusion summarizing the analysis of curve and surface manifolds in a three-dimensional Euclidean space.
Transcripts

5.0 / 5 (0 votes)
Thanks for rating: