Tensor Calculus 3a: The Covariant Basis
TLDRThis script delves into the concept of covariant basis vectors in arbitrary coordinate systems, using polar coordinates as an example. It emphasizes defining coordinate systems independently of Cartesian coordinates and introduces the covariant basis through differentiation of the position vector with respect to each coordinate. The explanation clarifies the intrinsic nature of these vectors and their role in describing geometric properties, such as the unit tangent vector along a curve, in any coordinate system.
Takeaways
- 📚 The script discusses the concept of covariant basis vectors in different coordinate systems, emphasizing the intrinsic definition of these vectors through differentiation.
- 🌐 It explains that covariant basis vectors are defined without reference to Cartesian coordinates, promoting a more general understanding of coordinate systems.
- 📏 The importance of defining a coordinate system by its own terms, using only geometric concepts, is highlighted to avoid reliance on other coordinate systems.
- 📈 The script introduces the process of defining polar coordinates by an arbitrary axis and origin, and explains how points in this system are defined by distance and angle.
- 📍 The concept of coordinate lines in polar coordinates is described, illustrating lines of constant theta and constant radius.
- 🔍 The method of deriving covariant basis vectors involves taking the derivative of the position vector with respect to each coordinate, providing a systematic approach to defining these vectors in any coordinate system.
- 📝 The script clarifies that the covariant basis vectors are intrinsic to the coordinate system and can be evaluated by calculating partial derivatives.
- 🧭 It demonstrates the process of evaluating covariant basis vectors for both Cartesian and polar coordinate systems, showing how they are derived from the position vector.
- 🔄 The components of a vector are tied to the coordinate system's basis, meaning the same vector can have different components in different bases.
- 📉 The script addresses the issue of comparing vectors based on their components, noting that this is not a valid approach due to the dependency of components on the coordinate system's basis.
- 🔍 The unit tangent vector to a curve is defined in terms of the derivative of the position vector with respect to arc length, showing a direct application of differentiation in coordinate geometry.
Q & A
What is the main purpose of defining covariant basis vectors?
-The main purpose of defining covariant basis vectors is to extend the concept of basis vectors I and J to arbitrary coordinate systems, allowing for a consistent way to describe vectors in any coordinate system without reference to a background coordinate system.
Why is it important to define a coordinate system on its own terms?
-It is important to define a coordinate system on its own terms because it ensures that the coordinate system is self-contained and does not rely on another coordinate system for its definition, which is essential for maintaining the integrity and independence of the coordinate system being used.
What is the significance of the covariant basis in polar coordinates?
-In polar coordinates, the covariant basis consists of vectors that are orthogonal to the coordinate lines, which helps in visualizing and working with the coordinate system. The covariant basis vectors are defined by the partial derivatives of the position vector with respect to the coordinates, providing an intrinsic way to describe direction in the coordinate system.
How are the covariant basis vectors in Cartesian coordinates related to the standard basis vectors I and J?
-In Cartesian coordinates, the covariant basis vectors are found to be the same as the standard basis vectors I and J. This is because the derivatives of the position vector with respect to x and y yield unit vectors in the x and y directions, respectively, which are the standard basis vectors.
What is the geometric interpretation of the covariant basis vector e_sub_R in polar coordinates?
-The geometric interpretation of the covariant basis vector e_sub_R in polar coordinates is the unit vector in the radial direction, pointing away from the origin towards the point in question. It represents the direction of increasing radial distance from the origin.
What is the issue with normalizing the covariant basis vector e_sub_theta in polar coordinates?
-Normalizing the covariant basis vector e_sub_theta in polar coordinates, which would make it a unit vector, can be problematic because it loses the geometric meaning of representing the direction orthogonal to the radial direction at a given point. Normalization can also complicate calculations and obscure the intrinsic properties of the coordinate system.
How does the covariant basis change with respect to different points in a coordinate system?
-The covariant basis changes with respect to different points in a coordinate system because it is defined by the partial derivatives of the position vector with respect to the coordinates, which vary from point to point. This means that the basis vectors are not constant and are specific to each point in the coordinate system.
Why is it incorrect to compare vectors by their components in different coordinate systems?
-It is incorrect to compare vectors by their components in different coordinate systems because the components of a vector are relative to the basis vectors of the coordinate system. Since the basis vectors change from one point to another, the same components can represent different vectors in different locations within the coordinate system.
What is the significance of the unit tangent vector in the context of a curve defined by parametric equations?
-The unit tangent vector is significant in the context of a curve defined by parametric equations because it provides the direction of the curve at a given point, which is essential for understanding the curve's behavior and for performing calculations related to the curve's geometry and dynamics.
How can the components of the unit tangent vector be expressed in terms of the curve's parametric equations?
-The components of the unit tangent vector can be expressed in terms of the curve's parametric equations by taking the derivative of the position vector with respect to the parameter (such as arc length) and then projecting this derivative onto the covariant basis vectors of the coordinate system. This process involves using the chain rule and the parametric equations to find the components of the tangent vector with respect to the basis.
Outlines
📚 Introduction to Covariant Basis in Coordinate Systems
This paragraph introduces the concept of extending the idea of vectors I and J to arbitrary coordinates, focusing on defining analogues of these vectors in a covariant basis. The speaker emphasizes the importance of defining a coordinate system without reference to Cartesian coordinates, using only geometric concepts. The polar coordinate system is used as an example to illustrate how to define a coordinate system intrinsically, with the covariant basis vectors being derived from the position vector R as a function of the coordinates.
🔍 Deriving Covariant Basis Vectors from Position Vector
The speaker explains the process of deriving covariant basis vectors from the position vector R, which becomes a function of two variables in the context of polar coordinates. The covariant basis vectors, denoted as E_sub_R and E_sub_theta, are defined through partial derivatives of R with respect to these variables. The process is intrinsic to the coordinate system and can be applied to any system, providing a consistent method for obtaining coordinate basis vectors.
📐 Geometric Interpretation of Covariant Basis in Polar Coordinates
This paragraph delves into the geometric interpretation of the covariant basis in polar coordinates. The speaker describes how the covariant basis vectors, E_sub_R and E_sub_theta, can be visualized and understood in terms of their geometric properties. E_sub_R is identified as the unit vector in the radial direction, while E_sub_theta is characterized as the unit vector in the tangential direction, orthogonal to E_sub_R.
🧩 Understanding the Implications of Covariant Basis Variation
The speaker discusses the implications of the covariant basis varying from point to point in a coordinate system. It is highlighted that the basis is not constant across different points, which means that the components of a vector can change depending on the location within the coordinate system. This paragraph emphasizes the importance of understanding that vector components are relative to the coordinate system's basis at a specific point.
🔄 The Gradient Vector and Its Relation to Covariant Basis
The concept of the gradient vector is introduced, along with its initial definition in terms of the covariant basis. The speaker notes that the gradient of a function F can be expressed using the covariant basis vectors, but acknowledges that this definition needs refinement. The paragraph explores the idea that the components of the gradient vector are dependent on the choice of coordinates and that a more accurate expression is required.
🌐 Orthogonal Coordinate Systems and Unit Tangent Vector
This paragraph focuses on orthogonal coordinate systems and the unit tangent vector in the context of curves defined by arc length. The speaker explains how the unit tangent vector can be expressed in terms of the covariant basis vectors of the coordinate system. The process involves taking the derivative of the position vector with respect to arc length and projecting it onto the covariant basis, resulting in a natural and elegant expression for the unit tangent vector's components.
📉 Calculating Unit Tangent Components in Arbitrary Coordinate Systems
The speaker provides a detailed explanation of how to calculate the components of the unit tangent vector in arbitrary coordinate systems. By using the chain rule and the derivatives of the position vector with respect to the coordinates, the unit tangent vector's components are derived. The process is demonstrated to be systematic and intrinsic to the coordinate system, yielding a general expression for the unit tangent vector's components in terms of the curve's parameters.
📈 General Expression for Unit Tangent Components Across Coordinate Systems
The final paragraph presents a general expression for the components of the unit tangent vector that is applicable across all coordinate systems. The speaker emphasizes the satisfaction of deriving such an expression through careful consideration of functions and their relationships. The components are expressed as a function of the curve's parameters, showcasing the harmony between the components of a vector and the covariant basis in any coordinate system.
Mindmap
Keywords
💡Covariant Basis
💡Polar Coordinates
💡Differentiation
💡Unit Tangent
💡Arc Length
💡Orthogonal Coordinate System
💡Position Vector
💡Partial Derivatives
💡Geometric Concepts
💡Vector Components
Highlights
Introduction of covariant basis vectors in arbitrary coordinate systems, extending the concept of I and J vectors.
Differentiation as a fundamental method to obtain important objects in coordinate geometry.
Defining polar coordinates without reference to Cartesian coordinates to maintain independence of coordinate systems.
The importance of defining a coordinate system by its own terms using geometric concepts.
Description of how to define a polar coordinate system with an arbitrary axis and origin.
Explanation of coordinate lines in polar coordinates and their significance.
Introduction of covariant basis vectors E_sub_R and E_sub_theta derived from the position vector R.
Algorithmic rule for finding covariant basis vectors through partial derivatives in any coordinate system.
Evaluation of covariant basis vectors for Cartesian coordinates and their relation to the unit vectors I and J.
Application of the covariant basis concept to polar coordinates and the resulting unit vectors.
Discussion on the orthogonal nature of coordinate systems and the implications for covariant basis vectors.
Clarification on the differences in vector components when comparing different coordinate systems.
Introduction of the concept of a vector gradient and its attempted definition in terms of covariant basis vectors.
Identification of issues with the attempted gradient definition and the need for a more accurate expression.
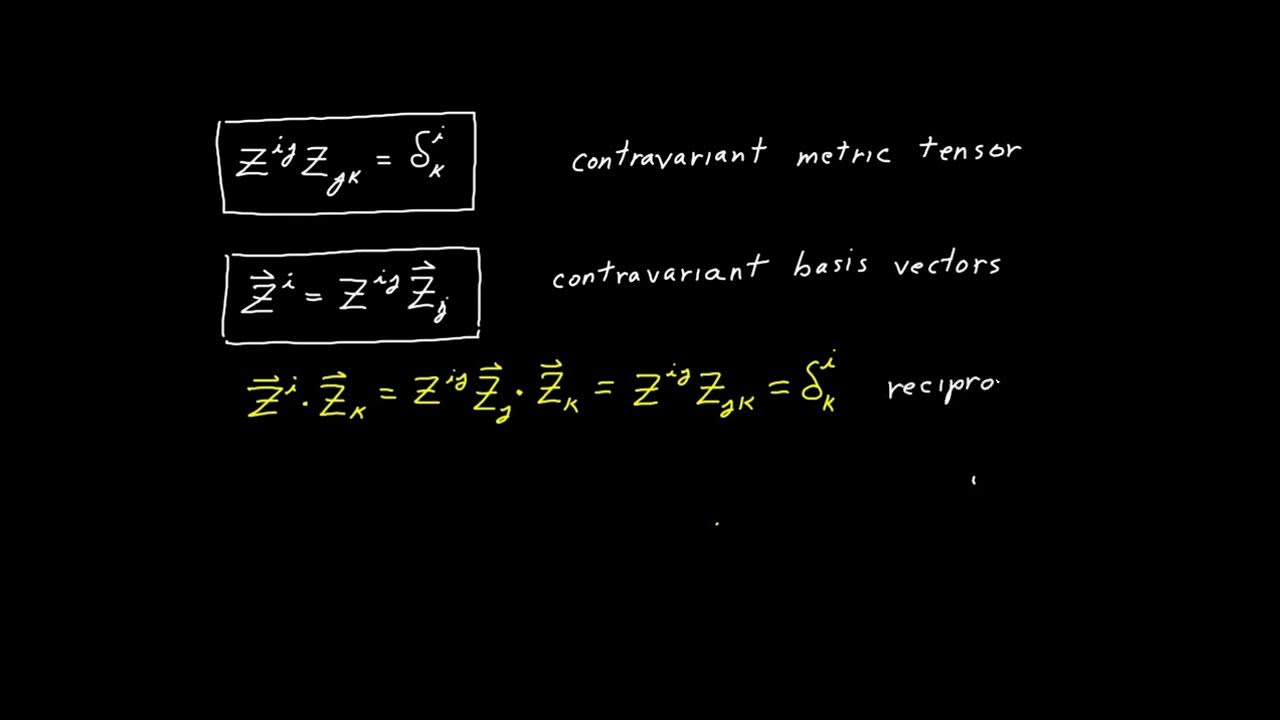
Proposal of a fix for the gradient definition using the dot product of covariant basis vectors.
Discussion on the normalization of covariant basis vectors and its impact on orthogonal coordinate systems.
Application of covariant basis concepts to the unit tangent vector of a curve defined by arc length.
Derivation of the unit tangent vector components using the chain rule and the curve's equation.
Final expression for the unit tangent vector components in terms of the curve's parameters and covariant basis.
Transcripts




5.0 / 5 (0 votes)
Thanks for rating: