Video 10 - Covariant Basis Examples
TLDRThis video from a tensor calculus series explores covariant basis vectors, illustrating their appearance in various coordinate systems. The host clarifies common misunderstandings by demonstrating how these vectors are tangent to coordinate lines and their lengths relate to arc lengths. Special cases like affine coordinates with straight lines and polar coordinates with circles are highlighted. The video uses graphing software to visually represent basis vectors in affine, polar, cylindrical, and spherical systems, emphasizing how their direction and magnitude vary with position, crucial for understanding tensor operations.
Takeaways
- 📚 The video discusses covariant basis vectors in the context of tensor calculus, aiming to provide a clearer understanding of their real-life applications.
- 🔍 Covariant basis vectors are defined as the set of partial derivatives of a position vector with respect to each coordinate variable.
- 📏 The length of a tangent vector derived from the derivative of a position vector with respect to a parameter is equal to DS/DT, where DS is the differential arc length and DT is the change in parameter.
- 📏 In the case where the parameter is the arc length itself, the tangent vector becomes a unit vector.
- 📈 Coordinate lines are defined by holding all but one coordinate constant and varying that one, mapping out a line in the coordinate system.
- 📍 The partial derivative of the position vector with respect to a coordinate variable is tangent to the corresponding coordinate line and its magnitude is DS/dz, where z is the coordinate variable.
- 📊 Most basis vectors encountered fit into two special categories: straight lines and circles, each having distinct properties regarding their direction and magnitude.
- 📐 In affine coordinates, basis vectors are parallel to the coordinate lines and their lengths are equal to the scaling factors of the respective dimensions.
- 🌐 In polar coordinates, the basis vector associated with the radial coordinate is a unit vector pointing outward, and the one associated with the angular coordinate has a length equal to the radius of the circle and is tangent to it.
- 📈 The direction and magnitude of covariant basis vectors in curvilinear coordinates depend on the point of evaluation, unlike in affine coordinates where they are fixed everywhere.
- 🧩 Linear combinations of basis vectors can be visualized by multiplying the basis vectors by scalar values and summing the results to form a resultant vector, which can change depending on the coordinate system used.
Q & A
What are covariant basis vectors?
-Covariant basis vectors are the set of partial derivatives of a position vector with respect to each coordinate variable. They represent the direction and scale of changes in each coordinate direction.
Why is it important to understand covariant basis vectors?
-Understanding covariant basis vectors is crucial as they provide a tangible representation of how space is locally oriented around a point in various coordinate systems, which is essential for tensor calculus and differential geometry.
What is the relationship between the covariant basis vector and the tangent vector of a curve?
-The covariant basis vector is tangent to the coordinate line in the direction of the corresponding coordinate variable. If the parameter of the curve is the arc length, the covariant basis vector becomes a unit vector tangent to the curve.
How do coordinate lines relate to partial derivatives of the position vector?
-Coordinate lines are the paths traced out when all but one coordinate variable are held constant. The partial derivative of the position vector with respect to a coordinate variable gives the direction of the tangent to the corresponding coordinate line.
What are the two special cases of coordinate lines mentioned in the script?
-The two special cases are when the coordinate line is a straight line, such as in affine coordinates, and when the coordinate line is a circle, such as in polar coordinates.
How does the length of the tangent vector relate to the arc length of the curve?
-The length of the tangent vector is equal to the derivative of the arc length with respect to the parameter, or |dS/dT|, where S is the arc length and T is the parameter.
What happens to the covariant basis vectors when the scaling factor changes?
-When the scaling factor changes, the length of the covariant basis vectors changes accordingly, but the direction of the vectors remains the same, provided the coordinate system remains orthogonal.
How do covariant basis vectors differ in affine coordinates compared to curvilinear coordinates?
-In affine coordinates, the covariant basis vectors are fixed and the same everywhere, whereas in curvilinear coordinates, the length and direction of the basis vectors depend on the point in space where they are evaluated.
What is a linear combination of vectors and how does it relate to covariant basis vectors?
-A linear combination of vectors is a sum of vectors each multiplied by a scalar. It relates to covariant basis vectors as any vector in the space can be expressed as a linear combination of the covariant basis vectors, with the coefficients being the components of the vector in that coordinate system.
Can you provide an example of how the covariant basis vectors change with different coordinate systems?
-In Cartesian coordinates, the covariant basis vectors are the unit vectors along the x, y, and z axes. In polar coordinates, the covariant basis vector for the radial coordinate (r) is a unit vector pointing away from the origin, and for the angular coordinate (theta), it is a vector tangent to the circle of radius r, with a length equal to r.
Outlines
📚 Introduction to Covariate Basis Vectors
This paragraph introduces the concept of covariate basis vectors in tensor calculus, explaining them as the set of partial derivatives of a position vector with respect to coordinate variables. The speaker criticizes the common approach of presenting formulas without practical illustrations and aims to clarify the concept with real-life examples. The paragraph recalls the tangent vector to a curve defined by a parameter and its relation to arc length, setting the stage for a deeper exploration of basis vectors in various coordinate systems.
📐 Special Cases of Covariate Basis Vectors
The speaker discusses two special cases of covariate basis vectors: one where the coordinate line is a straight line and another where it is a circle. In the first case, the basis vector is parallel to the coordinate line and its length is equal to the scaling factor times the coordinate value. In the second case, the basis vector is tangent to the circle, perpendicular to the radius, and its length is equal to the radius itself. The paragraph extends these concepts to higher dimensions, emphasizing that the basis vectors are tangent to the coordinate lines and their lengths are proportional to the arc length with respect to the coordinate variables.
📉 Visualization of Basis Vectors in Affine Coordinates
This section uses graphing software to visualize the basis vectors in affine coordinates, with a skew angle of 60 degrees and equal scaling factors of one. The speaker demonstrates how the covariant basis vectors lie along the coordinate lines and are unit vectors due to the scaling factors. The concept of a linear combination is illustrated by combining scaled basis vectors to reconstruct a given vector. The paragraph also shows the effect of changing the scaling factor on the basis vectors and the components of the vector, highlighting that the vector's invariant value remains unchanged despite changes in the coordinate system.
🌐 Exploring Basis Vectors in Polar and Cylindrical Coordinates
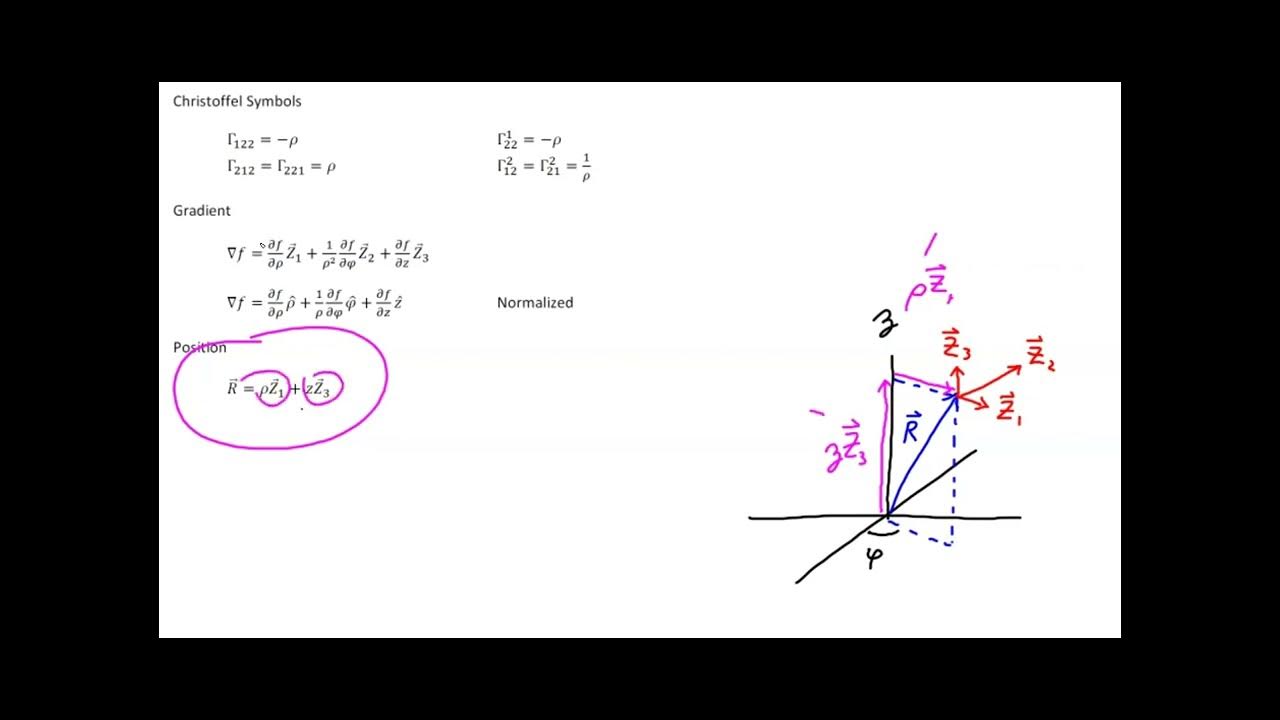
The speaker explores the basis vectors in plane polar coordinates, where the basis vector for the radial coordinate is a unit vector pointing outward from the origin, and the basis vector for the angular coordinate is tangent to a circle with a length equal to the radius. In cylindrical polar coordinates, the basis vector for the radial coordinate is a unit vector, while the basis vector for the angular coordinate is tangent to a circle with a length equal to the radius, and the vertical basis vector is unchanged by radial movement. The paragraph emphasizes the dependency of basis vector lengths and directions on the point of evaluation in curvilinear coordinates.
🌍 Spherical Polar Coordinates and Basis Vectors
In spherical polar coordinates, the speaker describes the basis vectors corresponding to the radial distance, polar angle, and azimuthal angle. The radial basis vector is a unit vector extending along the line of constant angles, the polar angle basis vector is tangent to a circle with a length equal to the radius, and the azimuthal angle basis vector is tangent to a circle with a length equal to the radius times the sine of the polar angle. The paragraph concludes by noting that while the basis vectors change with position, the linear combination of these vectors can be imagined despite not being explicitly illustrated.
Mindmap
Keywords
💡Covariate Basis Vectors
💡Partial Derivatives
💡Coordinate Lines
💡Tangent Vector
💡Arc Length
💡Affine Coordinates
💡Scaling Factors
💡Skew Angle
💡Polar Coordinates
💡Cylindrical Polar Coordinates
💡Spherical Polar Coordinates
Highlights
Introduction to covariant basis vectors as partial derivatives of the position vector with respect to coordinate variables.
Critique of literature for presenting formulas without practical illustrations.
Explanation of covariant basis vectors as tangent vectors to curves defined by a parameter.
Illustration of coordinate lines and their relationship to partial derivatives.
Demonstration of how the length of the tangent vector relates to the arc length parameter.
Special case analysis of straight line coordinate lines and their basis vectors.
Special case analysis of circular coordinate lines and their basis vectors.
Generalization of basis vector properties in higher dimensions.
Application of basis vector concepts to affine coordinates with a skew angle of 60 degrees.
Visualization of covariant basis vectors in Cartesian coordinates as x-hat and y-hat.
Exploration of plane polar coordinates and the basis vectors' dependence on radial distance and angle.
Graphical representation of basis vectors changing with position in curvilinear coordinates.
Explanation of how scaling factors affect the components of a vector but not its invariant value.
Cylindrical polar coordinates analysis with emphasis on the basis vectors' behavior.
Spherical polar coordinates discussion highlighting the unique properties of each basis vector.
Illustration of linear combinations in different coordinate systems and their dependency on basis vector properties.
Conclusion summarizing the understanding of covariant basis vectors and their practical significance.
Transcripts





5.0 / 5 (0 votes)
Thanks for rating: