Worked example: motion problems (with definite integrals) | AP Calculus AB | Khan Academy
TLDRThis educational script delves into the fundamental concepts of differential calculus, particularly focusing on motion in one dimension. It starts by explaining how taking the derivative of a position function with respect to time yields velocity, symbolized as ds/dt, and further differentiating velocity with respect to time gives acceleration, denoted as dv/dt. The narrative then explores the inverse process using antiderivatives to move from acceleration to velocity, and finally to position, given certain initial conditions. By applying these principles to a practical example where acceleration is constant, the video meticulously works through the process to derive expressions for velocity and position as functions of time, demonstrating the interconnectedness of these concepts in physics and calculus.
Takeaways
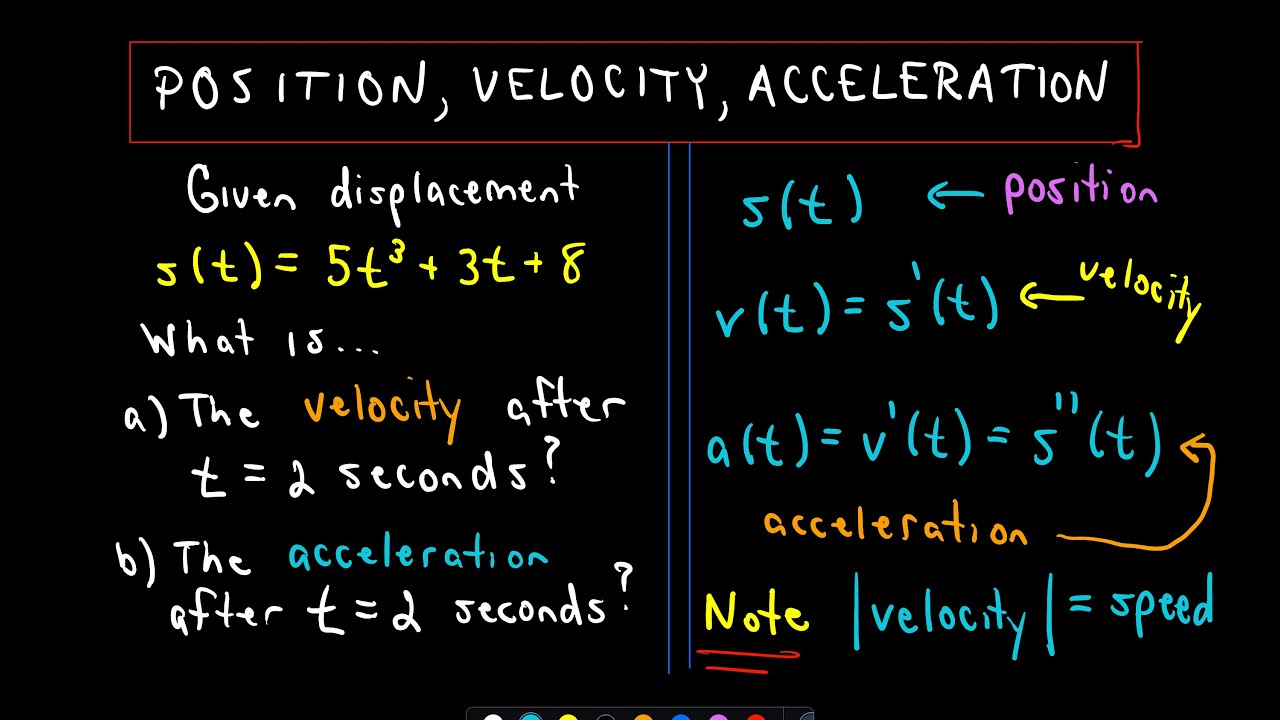
- 📚 The position of a particle in one dimension over time can be represented by a function S(t).
- 🔄 The first derivative of S(t) with respect to time gives the velocity function, denoted as dv/dt or v(t).
- 🌟 Velocity is another term for the rate at which position changes with respect to time.
- 🔄 The second derivative of S(t) with respect to time yields the acceleration function, represented as da/dt or a(t).
- 🌟 Acceleration describes the rate at which velocity changes with respect to time.
- 🔄 The antiderivative of the velocity function gives the position function, accounting for constants through initial conditions.
- 🔄 The antiderivative of the acceleration function directly provides the velocity function, including the constant of integration.
- 📈 Given an acceleration function a(t) = 1 (in meters per second-squared), the velocity function can be found by integrating to get v(t) = t - 6.
- 📊 Knowing the velocity at t=3 seconds (v(3) = -3 m/s) allows us to determine the constant of integration and thus the specific velocity function v(t) = t - 6.
- 📈 Given the position at t=2 seconds (s(2) = -10 meters), the position function can be derived by integrating the velocity function to get s(t) = (t^2)/2 - 6t.
- 🌟 The process of deriving the position and velocity functions from the acceleration function (and vice versa) demonstrates the relationship between these physical quantities in motion analysis.
Q & A
What is the relationship between a function S, its derivative with respect to time, and the physical quantity it represents?
-The function S represents the position of a particle in one dimension as a function of time. When we take the derivative of S with respect to time, we obtain the rate at which the position changes, which is known as velocity.
If we take the second derivative of the position function S with respect to time, what does it represent in terms of motion?
-The second derivative of the position function S with respect to time represents the rate of change of velocity, which is the acceleration of the particle.
How can we find the velocity function if we know the acceleration function and a particular velocity value at a given time?
-To find the velocity function when knowing the acceleration function and a particular velocity value at a given time, we integrate the acceleration function with respect to time, accounting for the constant of integration using the known velocity value at the given time.
What is the antiderivative of the acceleration function a(t) = 1 with respect to time?
-The antiderivative of the acceleration function a(t) = 1 with respect to time is t + C, where C is the constant of integration.
Given that the velocity at time t=3 is -3 m/s, what is the constant of integration C in the velocity function?
-Using the information that the velocity at time t=3 is -3 m/s, we can determine that the constant of integration C in the velocity function is -6.
How can we find the position function S(t) if we know the velocity function V(t) and a particular position value at a given time?
-To find the position function S(t), we integrate the velocity function V(t) with respect to time, using the known position value at a given time to determine the constant of integration.
What is the expression for the position function S(t) given the velocity function V(t) = t - 6?
-The position function S(t), given the velocity function V(t) = t - 6, is S(t) = (t^2)/2 - 6t + C, where C is the constant of integration determined by the initial position value.
Using the information from the script, what is the constant of integration C in the position function S(t)?
-The constant of integration C in the position function S(t) is 0, as determined by the given position at time t=2 being -10 meters.
What is the final expression for the position function S(t) based on the information provided in the script?
-The final expression for the position function S(t) is S(t) = (t^2)/2 - 6t, with no additional constant, as the constant of integration C was found to be 0.
How can the concepts of derivatives and antiderivatives be applied to solve problems involving motion?
-The concepts of derivatives and antiderivatives can be applied to problems involving motion by using the first derivative to find the velocity function from the position function, and the second derivative to find the acceleration function. Antiderivatives can then be used to find the position and velocity functions from the acceleration and velocity functions, respectively, by integrating and applying initial conditions to determine the constants of integration.
What is the verification process for the derived expressions of velocity and position functions?
-The verification process involves taking the derivative of the derived position function to ensure it matches the given velocity function and checking that the functions satisfy the initial conditions provided (e.g., the known velocity and position values at specific times).
Outlines
📚 Differential Calculus Review
This paragraph begins with a review of differential calculus concepts, focusing on the relationship between position, velocity, and acceleration. It explains that the derivative of the position function with respect to time yields the velocity function, and further differentiating velocity gives the acceleration. The process is also reversible, where integrating (taking the antiderivative) acceleration leads to velocity, and integrating velocity leads to position. The paragraph sets the stage for solving a problem involving these concepts.
🚀 Solving for Velocity and Position Functions
The paragraph presents a problem where the acceleration of a particle is a constant function of time, equal to 1 meter per second squared. Given the velocity at time t=3 seconds is -3 meters per second and the position at time t=2 seconds is -10 meters, the goal is to find the general expressions for velocity and position as functions of time. The solution involves integrating the constant acceleration to find the velocity function and then using the known velocity and position values to determine the constants in the expressions. The paragraph concludes with the derived expressions for both velocity (v(t) = t - 6) and position (s(t) = t^2/2 - 6t) functions of time.
Mindmap
Keywords
💡Differential Calculus
💡Derivative
💡Velocity
💡Acceleration
💡Antiderivivative
💡Position Function
💡Kinematics
💡Integration
💡Constants
💡Initial Conditions
💡Functions of Time
Highlights
Review of differential calculus concepts related to the position, velocity, and acceleration of a particle in one dimension.
Derivative of position function with respect to time yields velocity.
Second derivative of position function or derivative of velocity function gives acceleration.
Starting with acceleration and integrating yields the velocity function.
Starting with velocity and integrating yields the position function.
Given acceleration is a constant function of time equal to 1 meter per second-squared.
Velocity at time t is the antiderivative of acceleration with a constant term.
Position at time t is the antiderivative of velocity with a constant term.
Velocity at 3 seconds is negative 3 meters per second.
Position at 2 seconds is negative 10 meters.
Solving for the constant in the velocity function using the given velocity at 3 seconds.
Derivative of the velocity function with respect to time confirms it matches the given acceleration.
Solving for the constant in the position function using the given position at 2 seconds.
Verification of the derived velocity and position functions against the given data points.
The final expressions for velocity and position as functions of time are derived and verified.
The process demonstrates the application of calculus in determining motion parameters from given data.
The problem-solving approach can be applied to real-world physics and engineering scenarios.
The transcript serves as an educational resource for understanding the relationship between differential and integral calculus.
Transcripts
Browse More Related Video
Position, Velocity, Acceleration using Derivatives
Position vs Time, Velocity vs Time & Acceleration vs Time Graph (Great Trick to Solve Every Graph!!)
Physics 101 - Chapter 2 - Motion in One Dimension
Calculus 3 Lecture 12.4: Velocity and Acceleration of Vector Functions
AP Calculus AB - Straight Line Motion

AP Physics Workbook 1.H Relationship between Position,Velocity and Acceleration
5.0 / 5 (0 votes)
Thanks for rating: