Undamped Mechanical Vibrations & Hooke's Law // Simple Harmonic Motion
TLDRThis video explores the concept of mechanical vibrations, specifically the harmonic motion of a mass attached to a spring on a frictionless surface. It explains how Newton's second law and Hooke's law can be combined to derive a differential equation that models the system. The solution involves using trigonometric functions to represent the oscillations, with amplitude, frequency, and phase shift being key parameters. The video concludes with a graphical representation of the motion, demonstrating how these parameters affect the oscillation.
Takeaways
- 🔍 The video discusses mechanical vibrations, specifically focusing on the harmonic motion of a mass attached to a spring.
- 🧩 The setup involves a mass (m) on a frictionless surface, attached to a spring, which is displaced from its equilibrium position and then released.
- ⚖️ Newton's second law is applied to model the motion, with the acceleration represented as the second derivative of displacement (x).
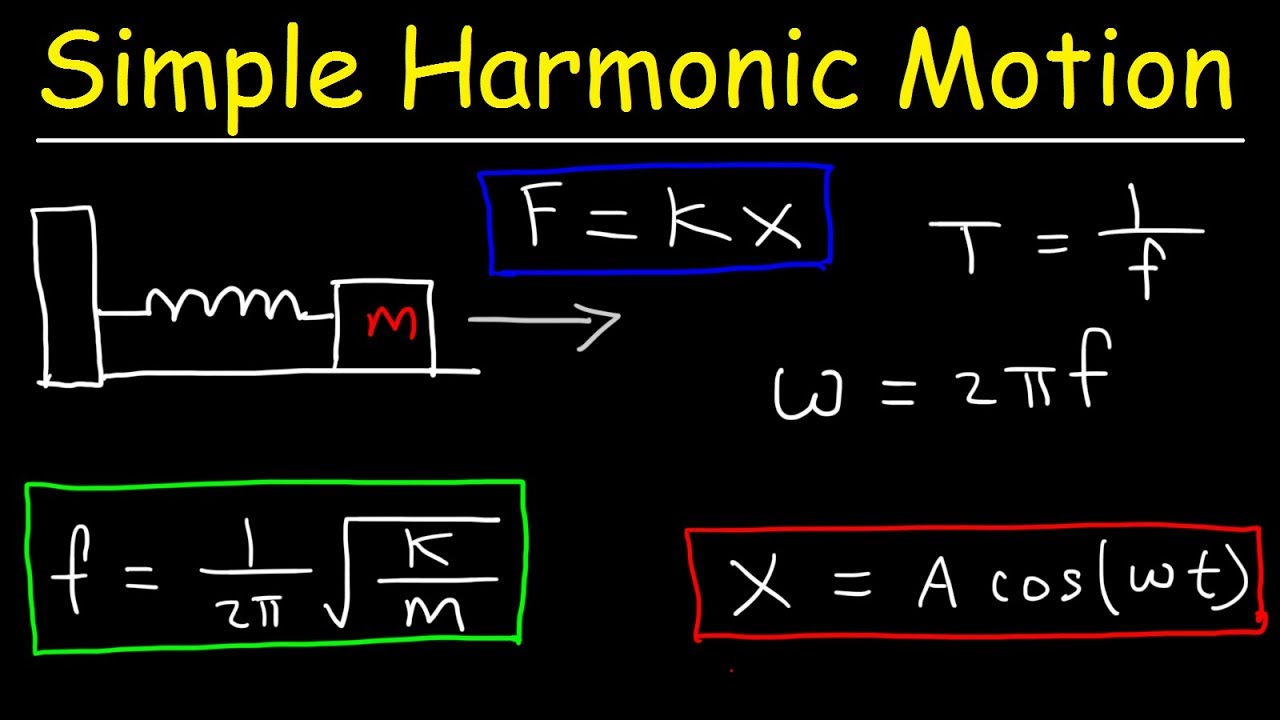
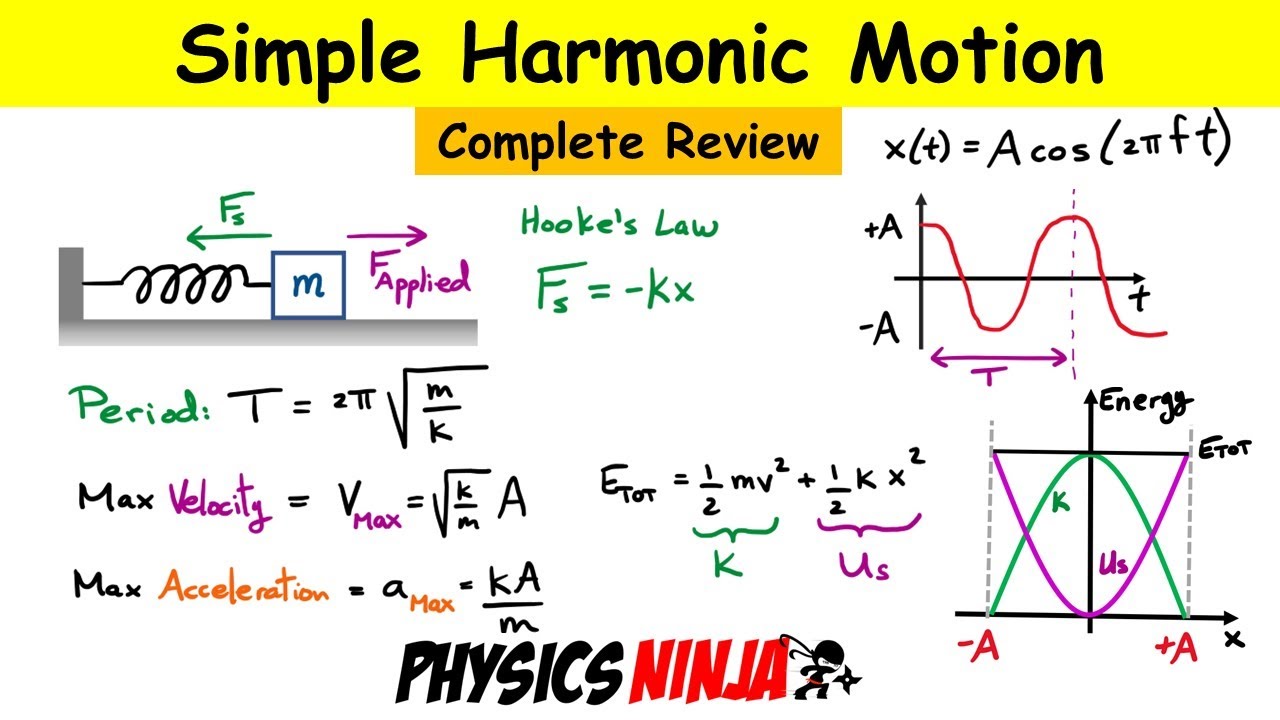
- 📚 Hooke's law is introduced to describe the force exerted by the spring, which is proportional to the displacement from the equilibrium position with a negative sign indicating the restoring force.
- 🔗 The differential equation governing the motion is derived by equating the mass times acceleration to the spring force, leading to (m d²x/dt² + kx = 0).
- 🎯 A solution to the differential equation is assumed to be of the form (x = e^{rt}), which leads to the characteristic equation and the identification of the complex roots (±i√(k/m)).
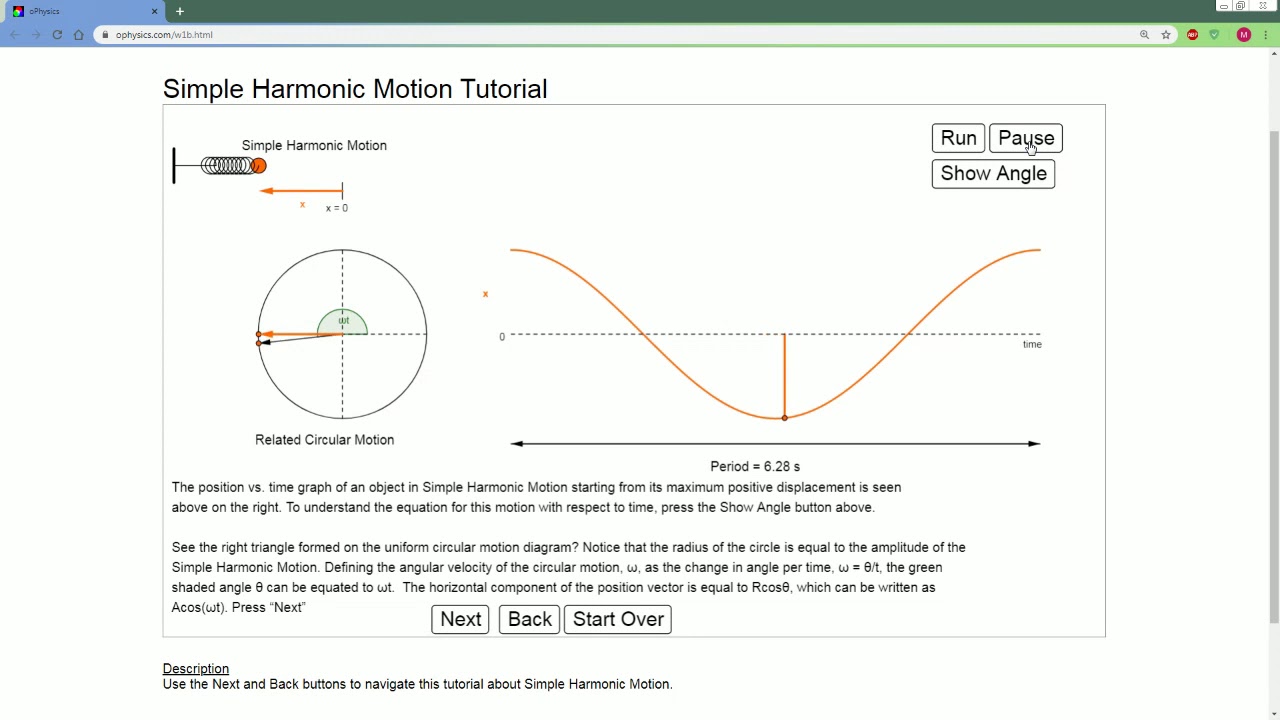
- 📉 The solution is expressed in terms of sines and cosines using Euler's formula, resulting in a general solution involving amplitude and phase shift.
- 🌀 The parameter (ω₀), or angular frequency, is introduced as (√(k/m)) and is key to determining the frequency of oscillation.
- 📊 The amplitude (a) and phase shift (γ) are parameters that affect the shape of the oscillation graph, with (a) controlling the extent of the oscillation and (γ) the starting position.
- ⏱ The frequency of oscillation is influenced by both the mass and the spring constant, with a larger mass or a stiffer spring leading to slower oscillations.
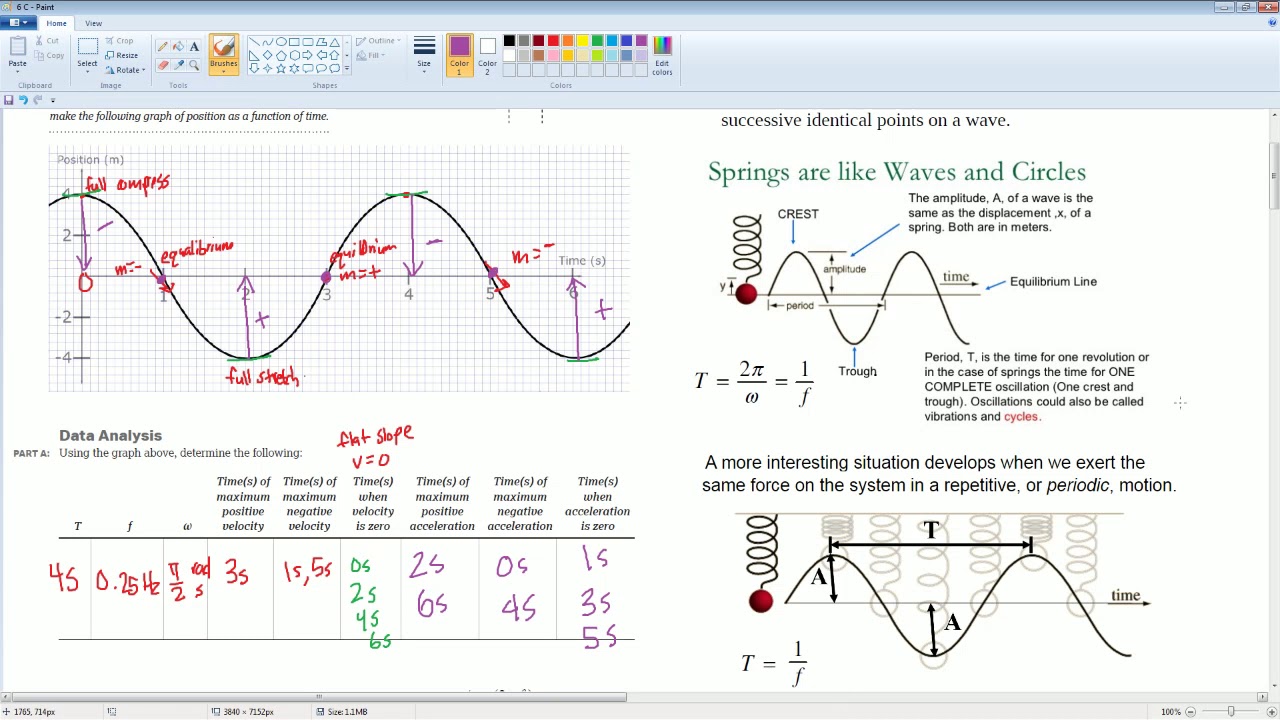
- 🔄 The video concludes with a graphical representation of the oscillation, demonstrating how varying the amplitude, frequency, and phase shift affects the graph.
Q & A
What is mechanical vibration as described in the video?
-Mechanical vibration, as described in the video, is a motion where a mass oscillates back and forth on a spring. This type of motion is also referred to as harmonic motion and is fundamental in various physics applications.
Why is it assumed that the surface is frictionless at the beginning of the video?
-The assumption of a frictionless surface at the beginning is to simplify the analysis of forces acting on the mass. It allows for the focus to be solely on the spring force, without the complication of frictional forces.
What is Hooke's Law and how does it relate to the spring force?
-Hooke's Law states that the force exerted by a spring is proportional to the displacement from its equilibrium position and is represented as F = -kx, where k is the spring constant and x is the displacement. It is directly related to the spring force as it quantifies how much force the spring applies to the mass.
How is Newton's second law applied to the mass-spring system in the video?
-Newton's second law, which states that the sum of forces on an object equals mass times acceleration, is applied by equating the spring force (from Hooke's Law) to the mass times the second derivative of displacement, resulting in the differential equation mx'' + kx = 0.
What is the significance of the differential equation mx'' + kx = 0 in the context of the video?
-The differential equation mx'' + kx = 0 is significant as it mathematically models the behavior of a mass attached to a spring. Solving this equation helps in understanding the motion of the mass under the influence of the spring force.
What is the form of the solution guessed for the differential equation, and why is it chosen?
-The guessed solution is of the form x = e^(rt), chosen because it represents a general oscillatory behavior. The derivatives of this form will lead to a characteristic equation that can be solved to find the constants describing the motion.
What is the characteristic equation derived from the guessed solution, and what does it represent?
-The characteristic equation derived is r^2 - (k/m) = 0. It represents the values of r that satisfy the differential equation, with r being related to the frequency of oscillation.
Why is the square root of k/m sometimes relabeled as ω₀ (omega naught)?
-The square root of k/m is relabeled as ω₀ (omega naught) as a shorthand for the natural frequency of the system. It is a common notation in physics to represent the frequency of oscillation in such systems.
How are the exponential terms from the characteristic equation related to sine and cosine functions?
-The exponential terms e^(±iω₀t) can be converted into sine and cosine functions using Euler's formula, which allows the solution to be expressed in terms of trigonometric functions that are more intuitive for describing oscillations.
What is the significance of the phase shift γ (gamma) in the solution a*cos(ω₀t - γ)?
-The phase shift γ (gamma) in the solution a*cos(ω₀t - γ) represents the horizontal shift of the oscillation on the time axis, indicating the initial position or timing of the oscillation relative to the equilibrium point.
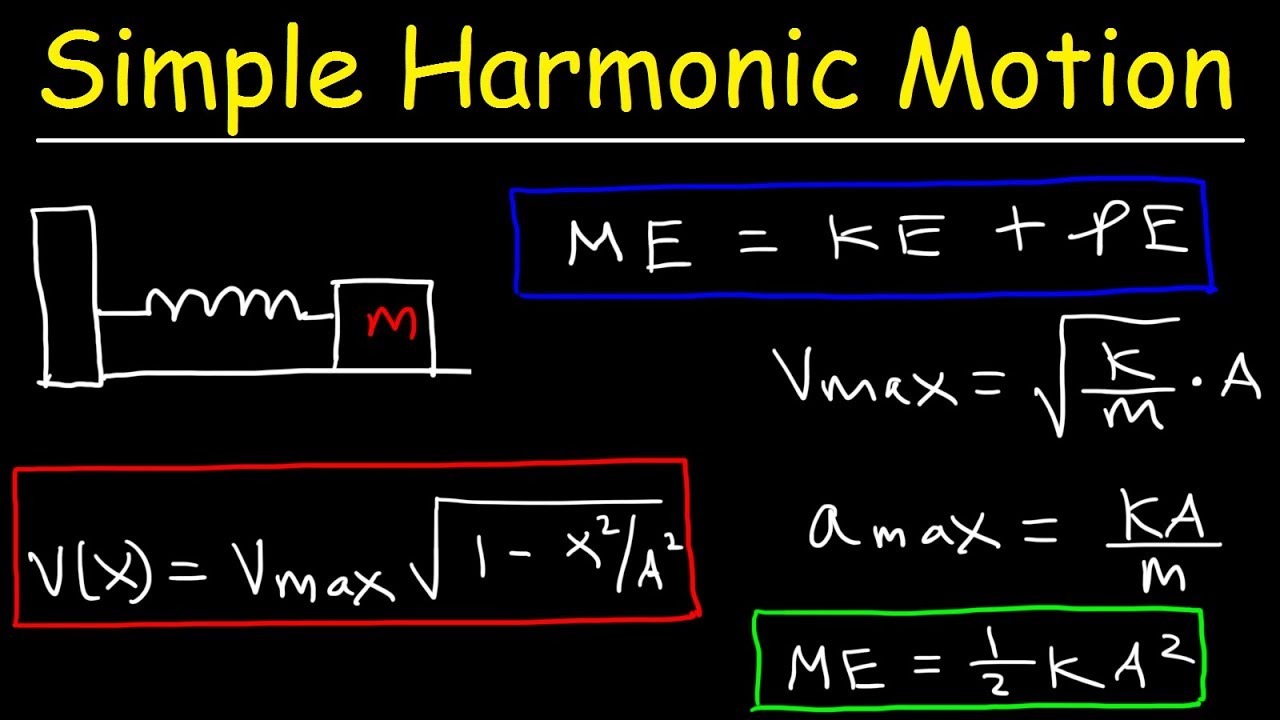
How does the amplitude 'a' affect the oscillation of the mass-spring system?
-The amplitude 'a' determines the extent of the oscillation. A larger value of 'a' results in a greater distance of oscillation from the equilibrium position, indicating a more pronounced motion.
What role does ω₀ (omega naught) play in the frequency of oscillation?
-ω₀ (omega naught) is directly related to the frequency of oscillation. A larger ω₀ results in faster oscillations, while a smaller ω₀ leads to slower oscillations, affecting how quickly the mass moves back and forth.
How does the phase shift affect the graphical representation of the oscillation?
-The phase shift affects the starting point of the oscillation on the time axis. A positive phase shift moves the oscillation to the left, while a negative shift moves it to the right.
What will be covered in the next video according to the script?
-The next video will discuss how to deal with mechanical vibrations when friction is included in the mass-spring system, expanding on the frictionless case presented in the current video.
Outlines
🔍 Introduction to Mechanical Vibrations and Harmonic Motion
This paragraph introduces the concept of mechanical vibrations, specifically focusing on a mass oscillating on a spring, which is a form of harmonic motion with significant applications in physics. The speaker sets the stage by visualizing a mass 'm' on a frictionless surface, attached to a spring. The equilibrium position is established, and the behavior of the mass when displaced from this position is described, including the spring's tendency to overshoot and the resulting back-and-forth motion. The challenge is then to model this motion mathematically, which involves using Newton's second law and Hooke's law to derive a differential equation representing the system. The solution to this equation is approached by assuming a form of the displacement function and using the properties of the spring constant 'k' and the mass 'm' to find the frequency of oscillation.
📚 Analyzing the Mass-Spring System and Solving the Differential Equation
The second paragraph delves deeper into the analysis of forces acting on the mass-spring system, using Newton's second law to equate the sum of forces to mass times acceleration, expressed as the second derivative of displacement 'x'. Hooke's law is introduced to describe the spring force as a function of displacement from equilibrium, leading to the formulation of a differential equation. The solution to this equation is explored by guessing a solution in the form of an exponential function, which, after differentiation, leads to a characteristic equation. The roots of this equation are found to be complex, indicating oscillatory behavior. The use of Euler's formula to convert the exponential terms into sine and cosine functions is explained, and the concept of angular frequency 'omega naught' is introduced. The paragraph concludes with the transformation of the solution into a single trigonometric function, involving amplitude 'a', phase shift 'gamma', and the relationship between these parameters and the physical properties of the system.
Mindmap
Keywords
💡Mechanical Vibrations
💡Harmonic Motion
💡Equilibrium Position
💡Hooke's Law
💡Newton's Second Law
💡Differential Equation
💡Characteristic Equation
💡Euler's Formula
💡Amplitude
💡Frequency
💡Phase Shift
Highlights
The video discusses mechanical vibrations, specifically the harmonic motion of a mass oscillating on a spring.
Harmonic motion is crucial in physics with various applications.
The concept of a mass on a frictionless surface attached to a spring is introduced.
Hooke's Law is explained as the force exerted by the spring, proportional to the displacement from equilibrium.
Newton's second law is applied to derive the differential equation for the mass-spring system.
The differential equation is mx'' + kx = 0, where x is the displacement.
A solution is proposed using the form x = e^(rt), leading to characteristic equation r^2 = -k/m.
The roots of the characteristic equation are ±i√(k/m), introducing the concept of angular frequency ω₀.
Euler's formula is used to convert the exponential solution into a cosine and sine function.
The general solution to the mass-spring problem is given as a combination of cosine and sine terms.
A method to combine the cosine and sine into a single cosine term with a phase shift is presented.
The amplitude, angular frequency, and phase shift are discussed as parameters affecting the oscillation.
The graphical representation of the oscillation is shown, illustrating the effect of changing parameters.
The amplitude affects the extent of the oscillation, visualized through the graph.
The angular frequency ω₀ determines the speed of oscillation, with larger values leading to faster motion.
The phase shift γ represents the horizontal displacement of the oscillation on the graph.
The video concludes with a teaser for the next video, which will include friction in the analysis of mechanical vibrations.
Transcripts
Browse More Related Video
How To Solve Simple Harmonic Motion Problems In Physics
01 - Oscillations And Simple Harmonic Motion, Part 1 (Physics Tutor)
Energy In a Simple Harmonic Oscillator - Maximum Velocity & Acceleration Calculations
AP Physics Lecture on Simple Harmonic Motion. Watch this before 6.C
Simple Harmonic Motion - Complete Review of the Mass-Spring System
AP Physics Workbook 6.C Equations of Motion for Simple Harmonic Motion
5.0 / 5 (0 votes)
Thanks for rating: