Video 83 - Riemann Normal Coordinates
TLDRThis video introduces Riemann normal coordinates, a specialized coordinate system that simplifies tensor calculus on manifolds. Defined by properties that make them resemble Cartesian coordinates at a point of origin, these coordinates have a metric tensor that is the identity matrix and zero first partial derivatives at that point. The video demonstrates their construction on a spherical surface and explains their geometric interpretation involving great circles. It also proves the general possibility of establishing such coordinates on any manifold, highlighting their utility in analyzing the Riemann tensor, which simplifies significantly when expressed in these coordinates.
Takeaways
- 📚 The video introduces Riemann normal coordinates, a special class of coordinates that simplify the analysis of manifolds in tensor calculus.
- 🌐 Riemann normal coordinates are defined by two properties: the metric tensor at the origin is the identity matrix, and the partial derivatives of the metric tensor with respect to the coordinates are zero at the origin.
- 📏 These coordinates are not Cartesian but behave like them at the point of origin, simplifying calculations locally around that point.
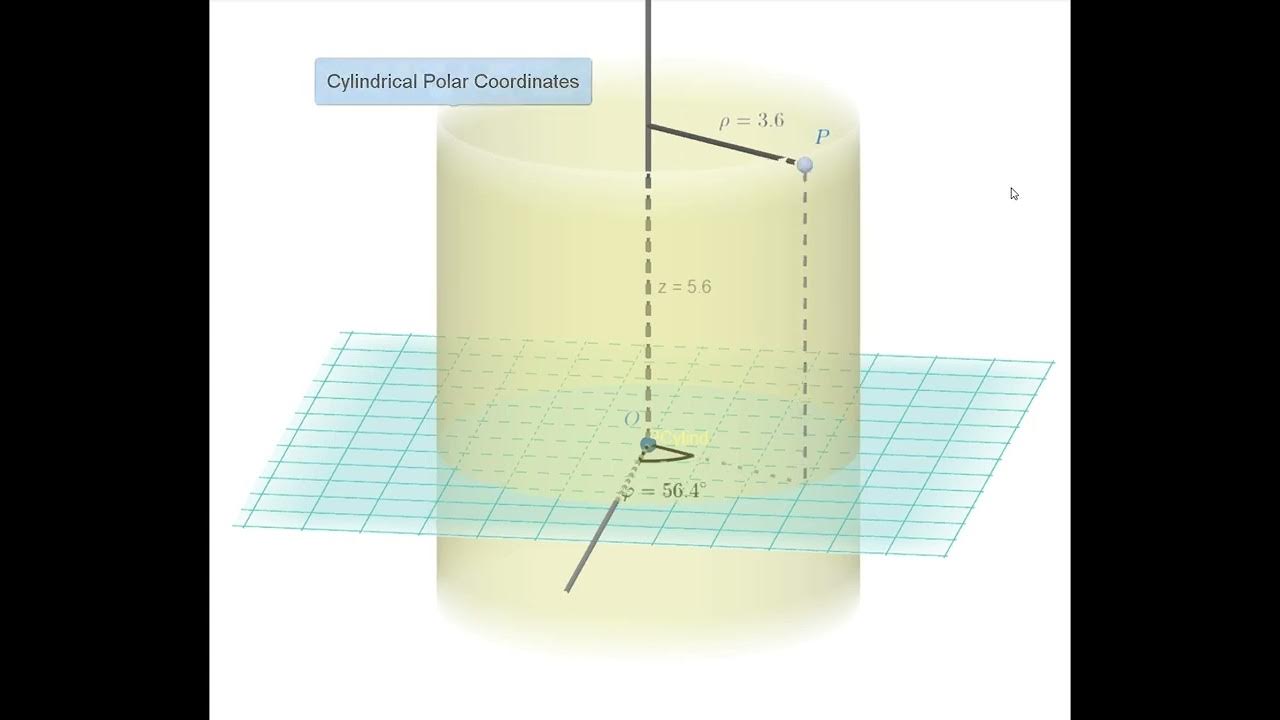
- 🔍 The script demonstrates the construction of Riemann normal coordinates using a spherical surface as an example, illustrating the transformation from standard spherical coordinates to new coordinates u and v.
- 📈 The metric tensor for the new coordinate system is derived using a transformation rule and Jacobian factors, resulting in a matrix that represents the local geometry of the manifold.
- 🔢 The partial derivatives of the metric tensor with respect to the new coordinates are calculated, showing that they are zero at the origin, confirming the properties of Riemann normal coordinates.
- 📍 The origin in the spherical example is identified as the intersection of two great circles, which are the coordinate lines for the new Riemann normal coordinate system.
- 📉 The process of constructing Riemann normal coordinates is not unique to the sphere and can be applied to any surface, using the normal to define planes that intersect at right angles.
- 🔄 The rotational orientation of the planes used to construct the coordinates is arbitrary, providing the freedom to rotate the coordinate system while still satisfying the properties of Riemann normal coordinates.
- 🧩 The video explains that it is always possible to establish Riemann normal coordinates on any manifold, regardless of the number of dimensions, due to the underdetermined nature of the conditions.
- 🔗 The final form of the Riemann tensor in Riemann normal coordinates is derived, showing that it simplifies to an expression involving only second partial derivatives of the metric tensor, which is useful for analyzing symmetries and identities of the tensor.
Q & A
What are Riemann normal coordinates?
-Riemann normal coordinates are a special class of coordinates defined by two properties: the metric tensor at a point of origin has a diagonal form with ones on the diagonal and zeros elsewhere, and the partial derivatives of the metric tensor with respect to the coordinates are zero at the point of origin.
Why are Riemann normal coordinates useful in tensor calculus?
-Riemann normal coordinates simplify the analysis of manifolds by making the calculations at a point resemble those in Cartesian coordinates, especially at the point of origin, where the Christoffel symbols and the partial derivatives of the metric tensor are zero.
How do Riemann normal coordinates relate to Cartesian coordinates?
-While Riemann normal coordinates are not Cartesian coordinates, they share similar properties at the point of origin, making the analysis of the manifold at that point as straightforward as in Cartesian coordinates.
What is the significance of the point of origin (p_sub_zero) in Riemann normal coordinates?
-The point of origin (p_sub_zero) is where the metric tensor has the properties of a Cartesian coordinate system, with the metric tensor being the identity matrix and its partial derivatives with respect to the coordinates being zero.
How are Riemann normal coordinates constructed on a spherical surface?
-On a spherical surface, Riemann normal coordinates are constructed by defining a set of coordinates (u and v) in terms of the standard spherical coordinates (theta and phi). The transformation from the standard coordinates to the new coordinates is such that the metric tensor at the point of origin has the desired properties.
What is the role of the Christoffel symbols in the definition of Riemann normal coordinates?
-The Christoffel symbols, which are defined in terms of the partial derivatives of the metric tensor, are zero when evaluated at the point of origin in Riemann normal coordinates. This simplifies the analysis of the manifold at that point.
Why are the properties of Riemann normal coordinates not valid everywhere on the manifold?
-The properties of Riemann normal coordinates being similar to Cartesian coordinates at the point of origin do not hold everywhere on the manifold because the partial derivatives of the metric tensor are not zero in general, away from the point of origin.
How do you determine the metric tensor for a new coordinate system in the context of Riemann normal coordinates?
-The metric tensor for a new coordinate system is determined by applying the transformation rule for the metric tensor, which involves the original metric tensor and the Jacobian factors derived from the transformation between the old and new coordinates.
What is the geometric interpretation of the point of origin in Riemann normal coordinates on a spherical surface?
-Geometrically, the point of origin on a spherical surface is where two great circles intersect, which are generated by planes passing through the center of the sphere and intersecting the surface at right angles.
Why are Riemann normal coordinates called 'normal'?
-Riemann normal coordinates are called 'normal' because they are constructed using the normal to the surface at the point of origin, which is involved in defining the planes that generate the coordinate lines.
How can the process of constructing Riemann normal coordinates be generalized to any point on any surface?
-The process can be generalized by finding a point on the surface, constructing the normal at that point, defining two planes that intersect at right angles using the normal, and using the arcs generated by the intersection of these planes with the surface as the coordinate lines for the Riemann normal coordinate system.
What is the mathematical justification for the existence of Riemann normal coordinates on any manifold?
-The mathematical justification comes from the fact that there are always more independent variables (Jacobian factors and second partial derivatives) than conditions (equations derived from the properties of the metric tensor), giving one degree of freedom to satisfy all conditions and establish Riemann normal coordinates.
Why can't the process of constructing Riemann normal coordinates be extended to second partial derivatives?
-The process cannot be extended to second partial derivatives because doing so would result in more conditions than free variables, making it impossible to find a solution that satisfies all conditions.
How does the simplification of the Riemann tensor expression in Riemann normal coordinates help in analyzing the tensor's properties?
-In Riemann normal coordinates, all the Christoffel symbols and first partial derivatives of the metric tensor are zero at the point of evaluation, which simplifies the Riemann tensor expression to a form involving only second partial derivatives, making it easier to evaluate symmetries and identities of the tensor.
Outlines
📚 Introduction to Riemann Normal Coordinates
This paragraph introduces the concept of Riemann normal coordinates in the context of tensor calculus. It explains that these coordinates are defined by two key properties: the metric tensor's diagonal elements are ones when the indices are equal and zeros when they are unequal at the origin point, and the partial derivatives of the metric tensor with respect to the coordinates are zero at the origin. Riemann normal coordinates simplify the analysis of the Riemann tensor and are likened to Cartesian coordinates at the point of origin but are not the same throughout the manifold. The paragraph also discusses the immediate consequence of this definition on the Christoffel symbols, which are zero at the origin point, and includes an illustration using a spherical surface to demonstrate the concept.
📐 Calculating the Metric Tensor for New Coordinates
The second paragraph delves into the process of calculating the metric tensor for a new coordinate system defined on a spherical surface. It describes the transformation from standard spherical coordinates (theta and phi) to a new set of coordinates (u and v). The metric tensor in the unprimed system is used, along with the Jacobian factors derived from the transformation, to find the metric tensor in the primed system. The process involves identifying non-zero Jacobian factors and applying them to the metric tensor components. The result is a metric tensor for the new coordinate system, which is then expressed in terms of the new coordinates u and v, using trigonometric identities.
🔍 Deriving Partial Derivatives and Evaluating at the Origin
This paragraph focuses on deriving the partial derivatives of the metric tensor with respect to the new coordinates and evaluating them at the origin of the coordinate system. It explains that most of the partial derivatives are zero due to the constants in the metric tensor, with the exception of one derivative that involves sine and cosine functions. The evaluation at the origin shows that the metric tensor becomes the identity matrix and all partial derivatives are zero, confirming that the defined coordinates qualify as Riemann normal coordinates.
🌐 Geometric Interpretation of Riemann Normal Coordinates
The fourth paragraph provides a geometric interpretation of Riemann normal coordinates on a spherical surface. It describes the point of origin as the intersection of two great circles generated by planes passing through the center of the sphere. The special nature of this point is highlighted, as it is where the planes intersect at right angles, forming the basis for the new coordinate system. The paragraph also discusses the arbitrariness of the rotational orientation of these planes and the generalization of this process to any point on any surface, emphasizing the use of the normal in constructing Riemann normal coordinates.
🔧 Establishing Riemann Normal Coordinates in Higher Dimensions
This paragraph discusses the mathematical process of establishing Riemann normal coordinates in higher dimensions. It involves taking partial derivatives of the metric tensor and applying the product rule, leading to a set of equations that must be satisfied for the coordinates to be considered Riemann normal. The paragraph explains that there are more independent variables than conditions, indicating an underdetermined system with one degree of freedom, which allows for the rotation of axes. The final part of the paragraph provides formulas for the number of conditions and degrees of freedom in any number of dimensions, confirming the possibility of establishing Riemann normal coordinates regardless of the dimension.
🔗 Connection to the Riemann Tensor and Simplification
The final paragraph connects the concept of Riemann normal coordinates to the Riemann tensor, highlighting the simplification that occurs when the tensor is expressed in these coordinates. It explains that in Riemann normal coordinates, all Christoffel symbols evaluate to zero, which greatly simplifies the expression of the Riemann tensor. The paragraph concludes with a simplified form of the Riemann tensor that will be useful for evaluating its symmetries and identities in future discussions.
Mindmap
Keywords
💡Riemann Normal Coordinates
💡Manifold
💡Metric Tensor
💡Christoffel Symbols
💡Partial Derivative
💡Spherical Surface
💡Transformation Rule
💡Jacobian Factors
💡Great Circle
💡Riemann Tensor
💡Symmetries and Identities
Highlights
Introduction to Riemann normal coordinates and their definition through two specific properties.
Riemann normal coordinates simplify tensor calculus analysis, particularly at the point of origin.
Properties of Riemann normal coordinates resemble Cartesian coordinates at the point of origin but are not constant throughout the manifold.
Christoffel symbols are zero at the point of origin in Riemann normal coordinates, simplifying their calculation.
Illustration of Riemann normal coordinates using a spherical surface and defining new coordinates u and v.
Transformation from standard spherical coordinates (theta and phi) to new coordinates (u and v).
Derivation of the metric tensor for the new coordinate system using the transformation rule and Jacobian factors.
Explanation of how to calculate the Jacobian factors for the transformation to Riemann normal coordinates.
Demonstration of the metric tensor's properties in the new coordinate system and its simplification at the origin.
Trigonometric identity application to express the metric tensor in terms of the new coordinates u and v.
Calculation of partial derivatives of the metric tensor and their evaluation at the origin.
Geometric interpretation of Riemann normal coordinates on a spherical surface and the significance of the point of origin.
Discussion on the construction of Riemann normal coordinates using the normal to any surface and their coordinate lines as great circles.
Generalization of the process to construct Riemann normal coordinates on any surface, not just a sphere.
Analysis of the degrees of freedom and conditions required to establish Riemann normal coordinates in any dimension.
Proof that Riemann normal coordinates can always be established due to the surplus of degrees of freedom over conditions.
Implications of Riemann normal coordinates for the simplification of the Riemann tensor expression in lower indexes.
Final form of the Riemann tensor in Riemann normal coordinates and its utility for evaluating symmetries and identities.
Transcripts




5.0 / 5 (0 votes)
Thanks for rating: