Video 05 - Curvilinear Coordinates
TLDRThis video delves into tensor calculus, introducing curvilinear coordinates through plane polar, cylindrical polar, and spherical polar coordinate systems. It explains how each system uniquely defines points in space using a combination of distances and angles, emphasizing the geometric construction of these systems without reliance on Cartesian coordinates. The video promises to explore coordinate transformations in the next installment.
Takeaways
- 📏 The video introduces curvilinear coordinates, which are different from the previously discussed affine coordinates as they involve non-straight coordinate lines.
- 📍 Curvilinear coordinates are exemplified by plane polar coordinates, where points in a two-dimensional space are defined by a radial distance (r) and an angle (theta) from a polar axis.
- 📉 In curvilinear coordinate systems like plane polar, circles of constant r and rays of constant theta are used to construct a grid, unlike the straight lines in affine systems.
- 🔍 The scale of r can be adjusted to change the spacing of the coordinate lines, but theta remains unscaled in the polar coordinate system.
- 🌐 The concept of curvilinear coordinates is expanded to three dimensions with cylindrical polar coordinates, where points are defined by the distance from the polar axis (rho), height above a base plane (z), and an angle (phi).
- 📈 Cylindrical polar coordinates allow for the visualization of a cylinder when holding rho constant and varying z and phi.
- 🌍 Spherical polar coordinates are another three-dimensional system, where points are defined by the direct distance from the origin (r), the angle from the polar axis (theta), and the angle in the plane (phi).
- 🌕 Spherical coordinates map out a sphere when the value of r is held constant, distinguishing them from cylindrical coordinates.
- 🚫 The script emphasizes that Cartesian coordinates are not necessary to define these curvilinear systems, which are established through geometric constructs alone.
- ⏲️ The video concludes with a preview of the next topic, which will be coordinate transformations, indicating a continuation of the series.
Q & A
What is the main topic discussed in the video?
-The main topic discussed in the video is tensor calculus, specifically focusing on curvilinear coordinates, including plane polar, cylindrical polar, and spherical polar coordinates.
What is the first step in defining a plane polar coordinate system?
-The first step in defining a plane polar coordinate system is selecting an arbitrary origin, referred to as point O, and constructing a ray from point O to the right, which is called the polar axis.
How are the coordinates in a plane polar coordinate system defined?
-In a plane polar coordinate system, the coordinates are defined by the distance from the origin to the point (r) in a straight line and the angle (theta) formed between the polar axis and the segment connecting the origin to the point.
What is the difference between affine and curvilinear coordinate systems?
-Affine coordinate systems have all coordinate lines as straight lines, whereas curvilinear coordinate systems have coordinate lines that are curved, such as circles in the case of polar coordinates.
How does the value of r change as you move further away from the origin in a plane polar coordinate system?
-As you move further away from the origin in a plane polar coordinate system, the value of r increases, as it represents the radial distance from the origin.
What is the significance of the angle theta in a plane polar coordinate system?
-The angle theta in a plane polar coordinate system signifies the direction from the polar axis to the point in question, and as you move in a circle, the value of theta increases.
What is the purpose of constructing a grid in a curvilinear coordinate system?
-Constructing a grid in a curvilinear coordinate system helps visualize the coordinate lines, such as the circles representing constant values of r and rays representing constant angle values, making it easier to understand the positioning of points within the system.
How does the cylindrical polar coordinate system differ from the plane polar coordinate system?
-The cylindrical polar coordinate system operates in three dimensions, adding a third coordinate, z, which represents the height above the plane constructed through the polar axis, while the plane polar coordinate system is two-dimensional.
What is the meaning of rho in cylindrical polar coordinates?
-In cylindrical polar coordinates, rho (ρ) represents the distance from a point in space back to the polar axis along a segment that is perpendicular to the axis.
How are spherical polar coordinates defined, and why are they called spherical?
-Spherical polar coordinates are defined by a direct distance from the origin to the point (r), the angle between the polar axis and the segment connecting the origin to the point (theta), and the angle formed at the base (phi). They are called spherical because holding the value of r constant while varying theta and phi sweeps out a spherical surface.
Why are the ranges of theta and phi limited in spherical polar coordinates?
-The ranges of theta and phi are limited in spherical polar coordinates to avoid ambiguity in the angular location of a point. Theta is limited from 0 to pi, and phi is limited from 0 to two pi.
What is the final point made in the video about the relationship between the Cartesian coordinate system and other coordinate systems?
-The final point made in the video is that while the Cartesian coordinate system is well-known and easy to use, it is not necessary to define other coordinate systems. Each coordinate system is defined in terms of geometric objects and stands on its own merit.
Outlines
📚 Introduction to Curvilinear Coordinates
This paragraph introduces the concept of curvilinear coordinates, specifically focusing on plane polar coordinates. It begins by explaining the setup of a polar axis from an arbitrary origin, point O, and the construction of a ray and circle to define the coordinate system. The two coordinates used are the radial distance 'r' from the origin to a point P and the angular coordinate 'theta' formed between the polar axis and the segment connecting the origin to point P. The paragraph emphasizes that these two values uniquely define every point in the two-dimensional space, and it also discusses how the coordinate grid is constructed with constant 'r' circles and angular rays. The concept of scaling the coordinate system is briefly touched upon, and the distinction between affine and curvilinear coordinate systems is highlighted.
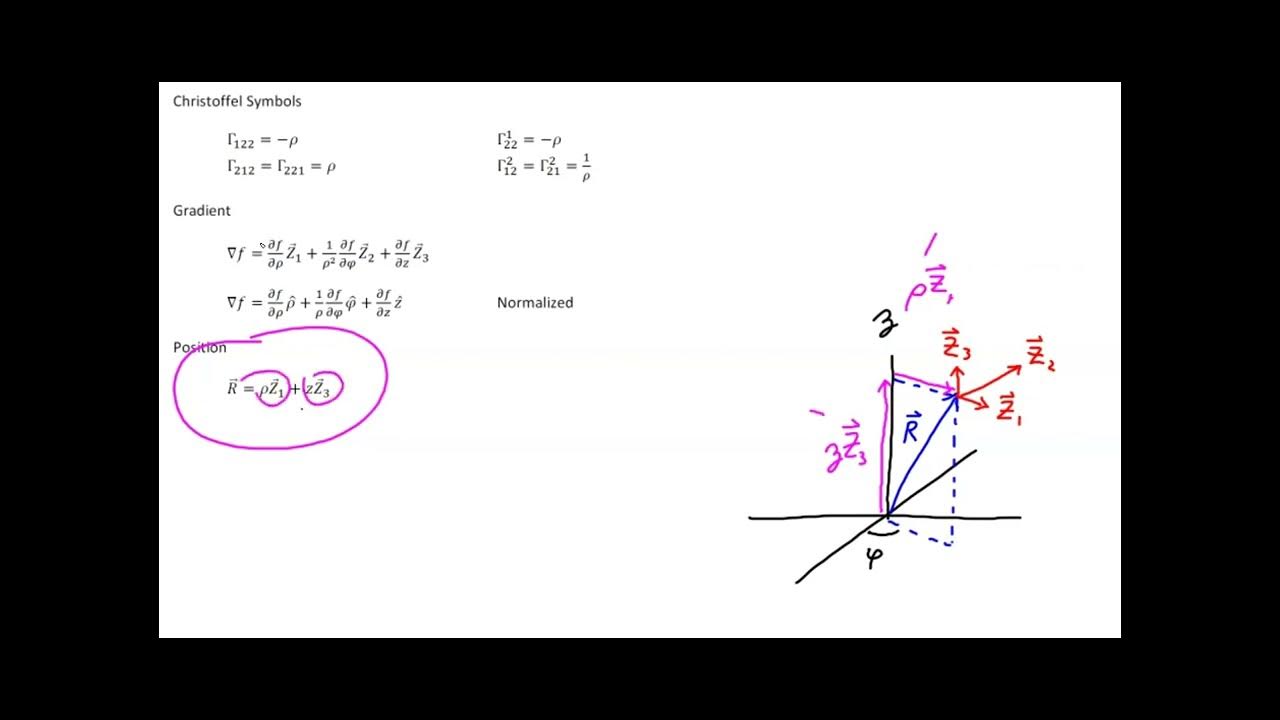
📐 Exploring Three-Dimensional Curvilinear Coordinates
The second paragraph delves into the construction of three-dimensional curvilinear coordinates, starting with cylindrical polar coordinates. It describes the process of defining the origin, constructing a polar axis, and creating a plane perpendicular to the axis. The method of locating a point P in space using the distance 'rho' from the polar axis, the height 'z' above the constructed plane, and the angular coordinate 'phi' is explained. The paragraph illustrates how these coordinates sweep out a cylindrical surface when 'rho' is held constant. The discussion then moves to spherical polar coordinates, which differ by measuring the direct distance 'r' from the origin to the point, the angle 'theta' between the polar axis and the segment to the point, and the angle 'phi'. The paragraph concludes by emphasizing the uniqueness of the coordinate system and the importance of limiting the range of 'phi' and 'theta' to avoid ambiguity.
🌐 Conclusion on Coordinate Systems and Upcoming Topics
In the final paragraph, the video script concludes the discussion on coordinate systems, specifically spherical polar coordinates, and emphasizes their geometric basis independent of the Cartesian coordinate system. It highlights that the coordinate systems introduced are defined through geometric objects and do not rely on the Cartesian system. The paragraph also previews the next topic of the series, which is coordinate transformations, and signals the end of the current video, inviting viewers to join for the next installment.
Mindmap
Keywords
💡Curvilinear Coordinates
💡Polar Axis
💡Plane Polar Coordinates
💡Cylindrical Polar Coordinates
💡Spherical Polar Coordinates
💡Coordinate Grid
💡Scale
💡Affine Coordinate System
💡Rho (ρ)
💡Theta (θ)
💡Phi (φ)
Highlights
Introduction to curvilinear coordinates in tensor calculus.
Explanation of constructing a polar axis and a circle to define a point in plane polar coordinates.
Use of distance and angle to uniquely define points in two-dimensional space.
Demonstration of how to construct a grid for plane polar coordinates.
Scaling of the coordinate system in plane polar coordinates.
Differentiation between affine and curvilinear coordinate systems.
Transition to three-dimensional space for cylindrical polar coordinates.
Construction of a polar axis and perpendicular plane for cylindrical coordinates.
Introduction of rho, z, and phi as coordinates in cylindrical polar coordinates.
Visual representation of how cylindrical polar coordinates sweep out a cylinder.
Explanation of curvilinear coordinates as opposed to affine coordinates.
Introduction to spherical polar coordinates with a different approach from cylindrical coordinates.
Use of direct distance from the origin as the first coordinate in spherical polar coordinates.
Limiting the range of theta and phi to avoid ambiguity in spherical polar coordinates.
Unique identification of points using spherical polar coordinates.
Visual representation of a sphere formed by holding the value of r constant in spherical coordinates.
Conclusion of the most commonly used coordinate systems in tensor calculus.
Emphasis on the independence of coordinate systems from the Cartesian coordinate system.
Anticipation of the next topic: coordinate transformations in the following video.
Transcripts




5.0 / 5 (0 votes)
Thanks for rating: