Introduction to Lagrangian Mechanics
TLDRThis script delves into the principles of Lagrangian mechanics, contrasting it with Newtonian mechanics. It explains how Newtonian methods calculate forces and acceleration to derive motion equations, while Lagrangian mechanics utilize the kinetic and potential energies to find the path of least action through the Euler-Lagrange equation. The script illustrates the application of Lagrangian mechanics on simple systems like a ball in the air and a pendulum, demonstrating its power in handling complex problems with constraints or generalized coordinates.
Takeaways
- 📚 Newtonian mechanics focuses on using forces to find acceleration and solve motion problems through integration.
- ⚖️ Calculating forces, like gravitational and spring forces, helps determine acceleration and ultimately the equation of motion.
- 🌀 Solving more complex problems, like a pendulum's motion, requires a switch to polar coordinates to simplify the calculation of forces.
- 🔗 Double pendulum problems introduce constraints that make it difficult to solve using only Newtonian mechanics.
- 🔄 Lagrangian mechanics offers an alternative approach by focusing on energy (kinetic and potential) instead of forces, making it useful for problems with constraints.
- 🔢 The Lagrangian is defined as the difference between kinetic energy (T) and potential energy (U), represented as L = T - U.
- 📉 The principle of least action states that the path taken by a system minimizes the action, which is the integral of the Lagrangian over time.
- 🧩 Lagrangian mechanics allows the use of generalized coordinates, which can be any set of variables that describe a system, offering more flexibility.
- 🔍 The Euler-Lagrange equation helps find the equations of motion by minimizing the action, applicable even in non-Cartesian coordinate systems.
- 🎓 Lagrangian mechanics is especially powerful in situations with forces of constraint or when using non-traditional coordinate systems, making it a versatile tool in physics.
Q & A
What is the main difference between Newtonian mechanics and Lagrangian mechanics?
-The main difference between Newtonian and Lagrangian mechanics is how they approach solving problems. Newtonian mechanics focuses on calculating forces and using them to determine acceleration and the equation of motion, while Lagrangian mechanics uses the concept of energy, specifically kinetic and potential energy, to derive the equations of motion without directly dealing with forces.
Why is the Lagrangian defined as T - U, and what do T and U represent?
-The Lagrangian is defined as T - U, where T represents the kinetic energy and U represents the potential energy. This formulation allows the use of the principle of least action, where the path taken by a system is the one that minimizes the action, a quantity defined as the integral of the Lagrangian over time.
How does Lagrangian mechanics handle problems with forces of constraint?
-Lagrangian mechanics is particularly powerful in handling problems with forces of constraint because it does not require the explicit calculation of constraint forces. Instead, it uses generalized coordinates and the principle of least action to derive the equations of motion, making it easier to deal with complex systems where constraints are present.
What is meant by 'generalized coordinates' in Lagrangian mechanics?
-Generalized coordinates are variables that can be used to describe the configuration of a system in Lagrangian mechanics. Unlike Cartesian or polar coordinates, generalized coordinates can be any variables that simplify the description of the system's motion, allowing for more flexibility in solving problems.
Why might solving a double pendulum problem be challenging using Newtonian mechanics?
-Solving a double pendulum problem using Newtonian mechanics is challenging because of the complexity of the forces involved, particularly the varying tension forces and the fact that the pivot point for the second pendulum is not fixed. This makes it difficult to directly apply Newton's laws without significant simplifications or approximations.
What is the principle of least action, and how is it applied in Lagrangian mechanics?
-The principle of least action states that the path taken by a system between two points is the one that minimizes the action, defined as the integral of the Lagrangian over time. In Lagrangian mechanics, this principle is used to determine the equations of motion by finding the path that minimizes this action.
How is the Euler-Lagrange equation derived, and what role does it play in Lagrangian mechanics?
-The Euler-Lagrange equation is derived from the principle of least action and provides a condition that the system's path must satisfy for the action to be minimized. It is a differential equation that relates the Lagrangian's partial derivatives with respect to the generalized coordinates and their time derivatives, allowing for the determination of the system's equations of motion.
What advantages does Lagrangian mechanics offer over Newtonian mechanics?
-Lagrangian mechanics offers several advantages over Newtonian mechanics, including the ability to handle systems with constraints more easily, the flexibility to use generalized coordinates, and the potential to solve problems without needing to directly calculate forces. It is also particularly useful in systems where energy methods are more natural or where the forces are not easily determined.
Can Lagrangian mechanics be used for systems with non-Cartesian coordinates, and if so, how?
-Yes, Lagrangian mechanics can be used for systems with non-Cartesian coordinates. It allows for the use of any coordinate system, such as polar or spherical coordinates, as long as the kinetic and potential energies can be expressed in terms of these coordinates. This flexibility makes it easier to solve problems where non-Cartesian coordinates are more natural.
What is the significance of the kinetic and potential energy in the Lagrangian formulation?
-The kinetic and potential energies are central to the Lagrangian formulation. The Lagrangian is defined as the difference between the kinetic energy (T) and the potential energy (U). This difference is used to construct the action, which is then minimized to determine the equations of motion. The kinetic energy represents the energy of motion, while the potential energy represents the stored energy due to the system's position.
Outlines
🔍 Introduction to Lagrangian Mechanics and Comparison with Newtonian Mechanics
The speaker introduces the concept of Lagrangian mechanics, using a rolling ball on a track as an example to set the stage. They compare this with Newtonian mechanics, explaining how forces like gravitational and spring forces can be calculated to determine acceleration and subsequently find the equation of motion. The process involves integrating the acceleration to find velocity and position. The speaker then discusses more complex scenarios like pendulums and double pendulums, highlighting the limitations of Newtonian mechanics in handling forces of constraint and introducing the need for Lagrangian mechanics as a more versatile tool.
🎯 The Principle of Least Action in Lagrangian Mechanics
This section delves into the principle of least action, a core concept in Lagrangian mechanics. The speaker explains that the path taken by a particle, such as a ball thrown in the air, is the one that minimizes the action. The action is defined as the integral of the Lagrangian over time. Various paths are considered, and the path with the minimum action is identified as the actual path taken by the ball. The speaker introduces the calculus of variations as the mathematical framework for finding the function that minimizes this integral, leading to the Euler-Lagrange equation.
🧮 Deriving the Equations of Motion Using the Euler-Lagrange Equation
The speaker walks through the application of the Euler-Lagrange equation to derive the equations of motion for a simple system, starting with a ball thrown vertically. They explain how to calculate the Lagrangian, which is the difference between kinetic and potential energy, and then apply the Euler-Lagrange equation to find the acceleration, confirming that it matches the expected result from Newtonian mechanics. This process is then applied to a pendulum, demonstrating the versatility of Lagrangian mechanics in using generalized coordinates like angles, rather than just Cartesian coordinates, to describe a system's dynamics.
🌐 Applications and Advantages of Lagrangian Mechanics
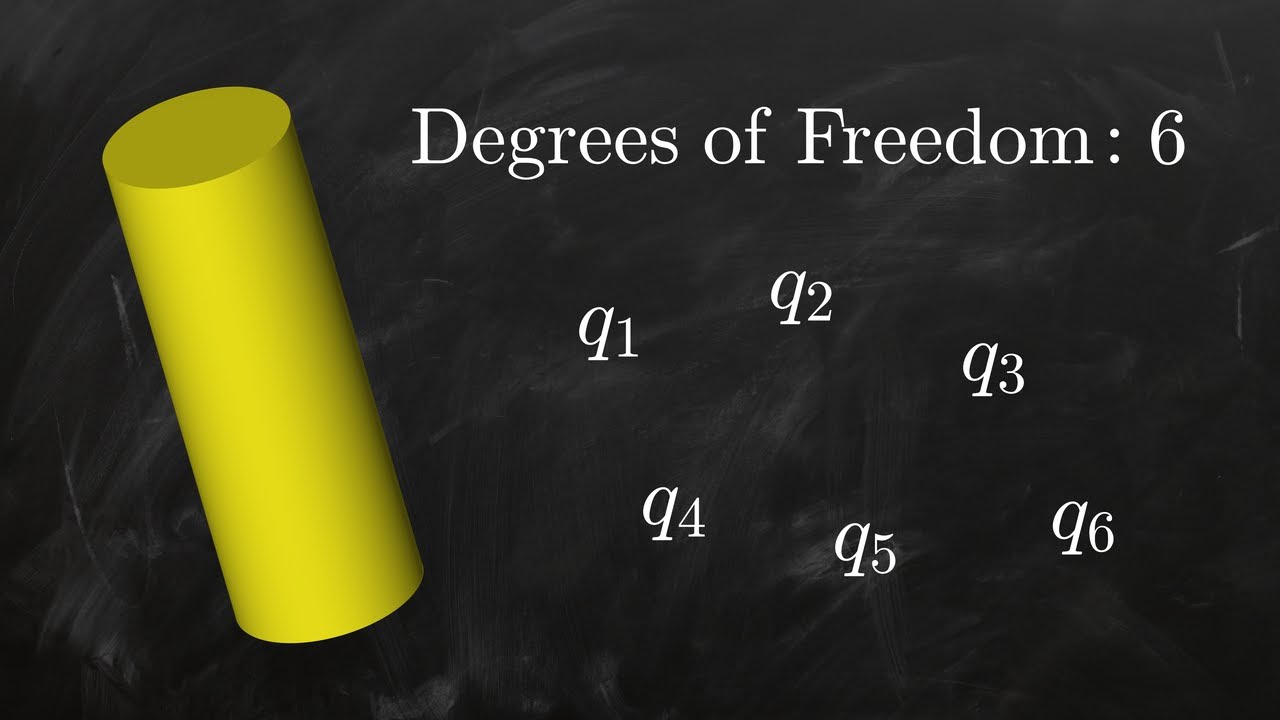
This final section emphasizes the advantages of Lagrangian mechanics, particularly in dealing with forces of constraint and using generalized coordinates. The speaker discusses how Lagrangian mechanics is especially useful when the forces are difficult to calculate directly, such as in systems with constraints or complex interactions. They explain how the number of degrees of freedom in a system determines the number of Lagrangian equations needed and suggest that overdefining a system with too many coordinates might require additional equations of constraint. The speaker concludes by encouraging further study and practice to fully grasp the concepts and applications of Lagrangian mechanics.
Mindmap
Keywords
💡Newtonian Mechanics
💡Lagrangian Mechanics
💡Kinetic Energy (T)
💡Potential Energy (U)
💡Principle of Least Action
💡Euler-Lagrange Equation
💡Generalized Coordinates
💡Double Pendulum
💡Forces of Constraint
💡Calculus of Variations
Highlights
Introduction to Lagrangian mechanics and its differences from Newtonian mechanics.
Explanation of Newtonian mechanics using an oscillating mass on a spring.
Challenges of using Newtonian mechanics to solve a pendulum problem due to the tension force.
Introduction to polar coordinates for simplifying the pendulum problem.
Complexity of solving double pendulum problems with Newtonian mechanics.
Lagrangian mechanics as a solution to handle forces of constraint and generalized coordinates.
Definition of the Lagrangian as the difference between kinetic energy (T) and potential energy (U).
Principle of least action and its role in determining the path of a system.
Example of calculating the action for a ball thrown in the air using different parabolic paths.
Introduction to the Euler-Lagrange equation for finding stationary states in calculus of variations.
Application of the Euler-Lagrange equation to derive the equations of motion.
Step-by-step derivation of the Lagrangian for a simple vertical motion of a ball.
Derivation of the Lagrangian for a pendulum problem using angular coordinates.
Advantages of Lagrangian mechanics in using non-Cartesian coordinates.
Importance of generalized coordinates and degrees of freedom in Lagrangian mechanics.
Mention of future topics such as including friction and equations of constraint in Lagrangian mechanics.
Transcripts
Browse More Related Video

Lagrangian Mechanics: How powerful is it?
Lagrangian Mechanics II: Degrees of freedom, generalized coordinates and a cylinder

Lagrangian and Hamiltonian Mechanics in Under 20 Minutes: Physics Mini Lesson
15. Introduction to Lagrange With Examples
Ch 12: What are generators in classical mechanics? | Maths of Quantum Mechanics

Is ACTION The Most Fundamental Property in Physics?
5.0 / 5 (0 votes)
Thanks for rating: