Video 67 - Projection Operator Examples
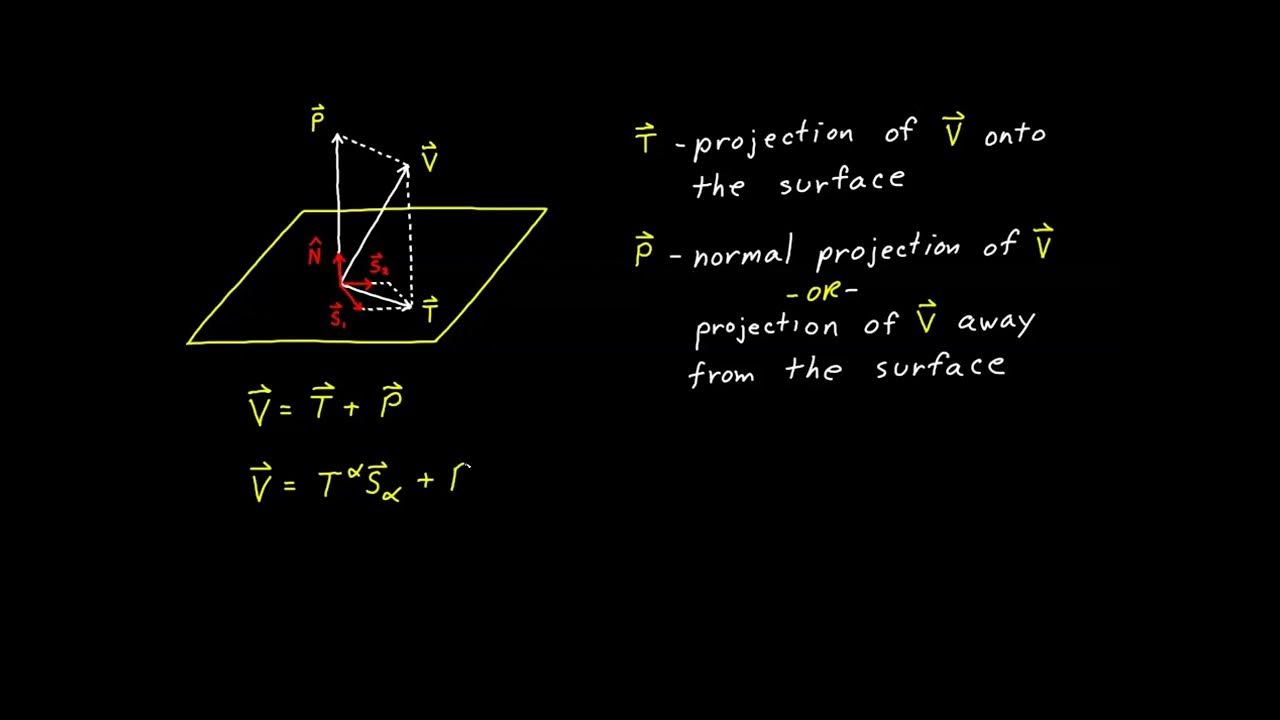
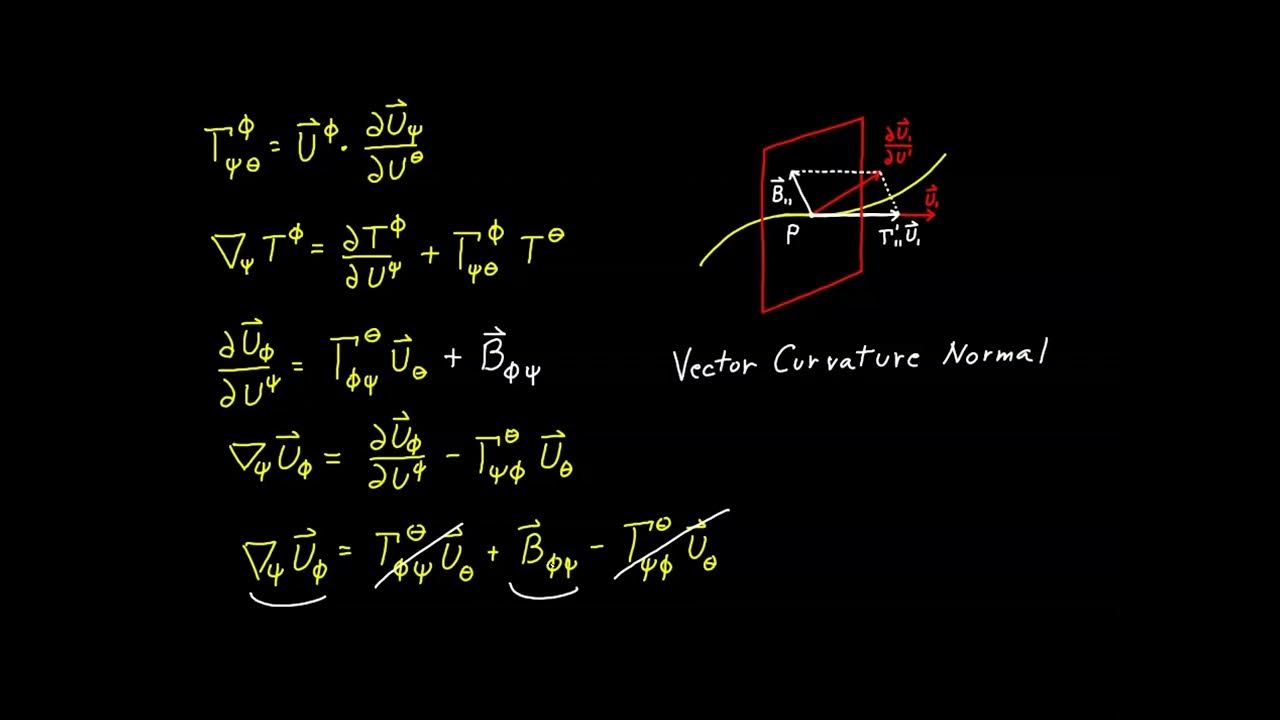
TLDRIn this video on tensor calculus, the instructor explores projection operators for various sample surfaces, starting with a cylindrical surface. The normal projection operator is derived using the normal vector components in Cartesian coordinates, validating key identities like the contraction resulting in the operator itself. The surface projection operator is calculated by contracting the shift tensor with its inverse. The process is streamlined for spherical and toroidal surfaces using previously established identities, leading to a comprehensive understanding of projection operators across different geometrical shapes.
Takeaways
- 📚 The video discusses projection operators for different sample surfaces, starting with a cylindrical surface.
- 📐 The normal projection operator for a cylindrical surface is defined using the normal vector in Cartesian coordinates, with contravariant and covariant components being the same.
- 🔍 The normal vector for the cylinder lacks a z-component, which is zero, simplifying the projection operator calculation.
- 🧩 The normal projection operator is constructed by multiplying the normal vector components in all possible combinations.
- 🔢 The script validates the identity that the sum of the diagonal elements of the normal projection operator equals 1, which is a fundamental property.
- 🔄 The contraction of the normal projection operator with itself results in the operator itself, a key property demonstrated in the video.
- 🌐 The surface projection operator is derived by contracting the shift tensor with its inverse, resulting in a 2x2 identity matrix for the cylinder.
- 📉 For the cylindrical surface, the surface projection operator is not the identity matrix but a 3x3 matrix with specific elements calculated from the normal vector.
- 🌍 The video also covers the projection operators for spherical and toroidal surfaces, using similar methods to derive their respective operators.
- 📝 The identities for the projection operators, such as the sum of the diagonal elements equaling specific values and the contraction of the operators with themselves, are validated.
- 🔑 The final identity discussed is the sum of the normal and surface projection operators equating to the delta function, which is confirmed for diagonal and off-diagonal elements.
Q & A
What is the normal projection operator for a cylindrical surface?
-The normal projection operator for a cylindrical surface is formed by multiplying the possible combinations of the normal vector components. It results in a matrix where the diagonal elements are cosine squared theta, sine squared theta, and 0, and the off-diagonal elements are sine theta times cosine theta, with the third row and column being zeros due to the absence of a z-component in the normal vector.
How is the normal projection operator for a cylindrical surface derived?
-The normal projection operator is derived by considering the normal vector in Cartesian coordinates and multiplying its components in all possible combinations. The result is a matrix where the diagonal elements represent the squares of the normal vector components, and the off-diagonal elements represent the products of different normal vector components.
What identity is validated for the normal projection operator of a cylindrical surface?
-The identity validated for the normal projection operator is that the sum of the diagonal elements (p11 + p22 + p33) equals 1, which is the sum of cosine squared theta plus sine squared theta plus 0, confirming the Pythagorean identity.
How does the contraction of the normal projection operator with itself result?
-The contraction of the normal projection operator with itself results in the same normal projection operator, demonstrating that the operator is idempotent. This is shown by multiplying the matrix by itself and simplifying the resulting expressions to match the original matrix.
What is the surface projection operator and how is it related to the shift tensor?
-The surface projection operator is a tensor formed by the contraction of the shift tensor with its inverse, using the surface indexes as the dummy index. It projects vectors onto the tangent space of the surface and is crucial for various calculations in tensor calculus on surfaces.
What is the result of the surface projection operator for a cylindrical surface?
-The surface projection operator for a cylindrical surface results in a 3x3 matrix where the diagonal elements are 1, and the off-diagonal elements are 0, except for the elements (1,2) and (2,1) which are -sine(theta) * cos(theta) and its negative, due to the properties of the cylindrical surface.
How can the surface projection operator be derived using the normal projection operator?
-The surface projection operator can be derived using the normal projection operator by applying the identity that the sum of the normal and surface projection operators equals the identity matrix. By subtracting the diagonal elements of the normal projection operator from 1, we obtain the diagonal elements of the surface projection operator, and the off-diagonal elements are the additive inverses of those in the normal projection operator.
What identities are confirmed for the surface projection operator of a cylindrical surface?
-The identities confirmed for the surface projection operator include that the sum of the diagonal elements equals 2, and that contracting the operator with itself yields the same surface projection operator. Additionally, the sum of the normal and surface projection operators equals the identity matrix.
How are the projection operators for a spherical surface derived?
-The projection operators for a spherical surface are derived by multiplying the components of the external normal vector in all possible combinations. The surface projection operator is then derived using the identity that the sum of the normal and surface projection operators equals the identity matrix.
What is the significance of the identity involving the sum of the normal and surface projection operators?
-The identity involving the sum of the normal and surface projection operators is significant because it shows that the sum equals the identity matrix, which is a fundamental property in tensor calculus. This identity ensures that when the diagonal elements of the sum are equal to 1 and the off-diagonal elements are 0, the operators correctly project onto the normal and tangent spaces of the surface.
How are the projection operators for a torus derived?
-The projection operators for a torus are derived similarly to those for a spherical surface, by multiplying the components of the external normal vector in all possible combinations. The surface projection operator is then derived using the same identity involving the sum of the normal and surface projection operators.
Outlines
📚 Introduction to Projection Operators on Sample Surfaces
This paragraph introduces the concept of projection operators in the context of tensor calculus, specifically focusing on their application to cylindrical, spherical, and toroidal surfaces. The speaker begins by explaining the normal projection operator for a cylindrical surface, detailing its components in Cartesian coordinates and emphasizing that covariant and contravariant components are identical due to the absence of a z-term. The paragraph also covers the validation of certain identities related to the projection operator, such as the sum of diagonal elements equating to one, and the projection operator being idempotent upon contraction with itself.
🔍 Detailed Analysis of Cylindrical Surface Projection Operators
The speaker continues the discussion on projection operators by delving deeper into the cylindrical surface's normal projection operator. The process of matrix multiplication to validate the identity of the projection operator with itself is demonstrated. Each element of the resulting matrix is calculated, showing how the contraction leads to the reaffirmation of the normal projection operator. The paragraph also introduces the concept of the surface projection operator, explaining its derivation through the contraction of the shift tensor with its inverse, and highlighting the dimensions and the mathematical process involved in this operation.
📘 Derivation of Surface Projection Operator for Cylindrical Surface
In this section, the speaker provides a step-by-step derivation of the surface projection operator for a cylindrical surface. The process involves calculating the contraction of the shift tensor with its inverse along the surface index, resulting in a 3x3 matrix. Each component of the matrix is derived through specific multiplications and additions, leading to the final form of the surface projection operator. The speaker also verifies the identity that the contraction of the surface projection operator along its indices should yield a value of 2, confirming the correctness of the derived operator.
🌐 Exploring Spherical and Toroidal Surface Projection Operators
The speaker transitions to discussing the projection operators for spherical and toroidal surfaces. The method for deriving these operators involves multiplying the components of the external normal vector for each surface. The paragraph outlines the process for calculating the normal projection operator and then uses an identity to simplify the derivation of the surface projection operator. The identities related to the sum of the normal and surface projection operators equating to the delta function are also briefly mentioned, with the speaker inviting the viewer to confirm these identities independently.
🎯 Conclusion on Projection Operators for Sample Surfaces
Concluding the video script, the speaker summarizes the projection operators for the cylindrical, spherical, and toroidal surfaces. The paragraph emphasizes the successful demonstration of the projection operators for each surface, highlighting the methodical approach taken to derive and validate these operators. The speaker also encourages the viewer to explore and confirm the remaining identities related to the surface projection operators, reinforcing the comprehensive understanding of the topic.
Mindmap
Keywords
💡Projection Operator
💡Cylindrical Surface
💡Normal Vector
💡Contravariant and Covariant Components
💡Identity Matrix
💡Shift Tensor
💡Spherical Surface
💡Toroidal Surface
💡Tensor Calculus
💡Contraction
Highlights
Introduction to projection operators on sample surfaces in tensor calculus.
Explanation of the normal projection operator for a cylindrical surface in Cartesian coordinates.
Demonstration of the normal projection operator's components for a cylindrical surface.
Validation of the identity p_ii = 1 for the normal projection operator.
Illustration of the contraction of the normal projection operator with itself.
Confirmation of the identity for the normal projection operator through matrix multiplication.
Introduction to the surface projection operator and its formula.
Derivation of the surface projection operator for a cylindrical surface.
Identification of the surface projection operator's properties and its relation to the identity matrix.
Verification of the identity for the surface projection operator's contraction yielding the delta function.
Discussion on the sum of the normal and surface projection operators equating to the delta function.
Transition to the spherical surface and the application of the normal projection operator formula.
Simplification of deriving the surface projection operator for the spherical surface using an identity.
Presentation of the surface projection operator for the spherical surface and its properties.
Application of the same simplification technique to the torus for deriving its projection operators.
Final presentation of the projection operators for the torus and conclusion of the video.
Transcripts




5.0 / 5 (0 votes)
Thanks for rating: