AP Physics 1 - Rotational Kinematics
TLDRIn this educational video, Dan Fullerton explores rotational kinematics, drawing parallels with translational kinematics. He explains the conversion between degrees and radians, and introduces key concepts such as angular displacement, velocity, and acceleration. Using the right-hand rule, he clarifies the direction of angular velocity and provides equations for solving problems involving rotational motion. The video includes several examples, from calculating Earth's angular velocity to analyzing a bear on a unicycle, effectively illustrating the principles of rotational physics.
Takeaways
- 📐 Radians and degrees are two ways to measure rotational motion, with 2π radians being equivalent to 360 degrees.
- 🔄 Angular displacement (ΔΘ) is the rotational counterpart to linear displacement (Δs), and is measured in radians.
- 🛤️ The relationship between linear and angular displacement is given by s = r * θ, where s is the linear distance traveled and r is the radius of rotation.
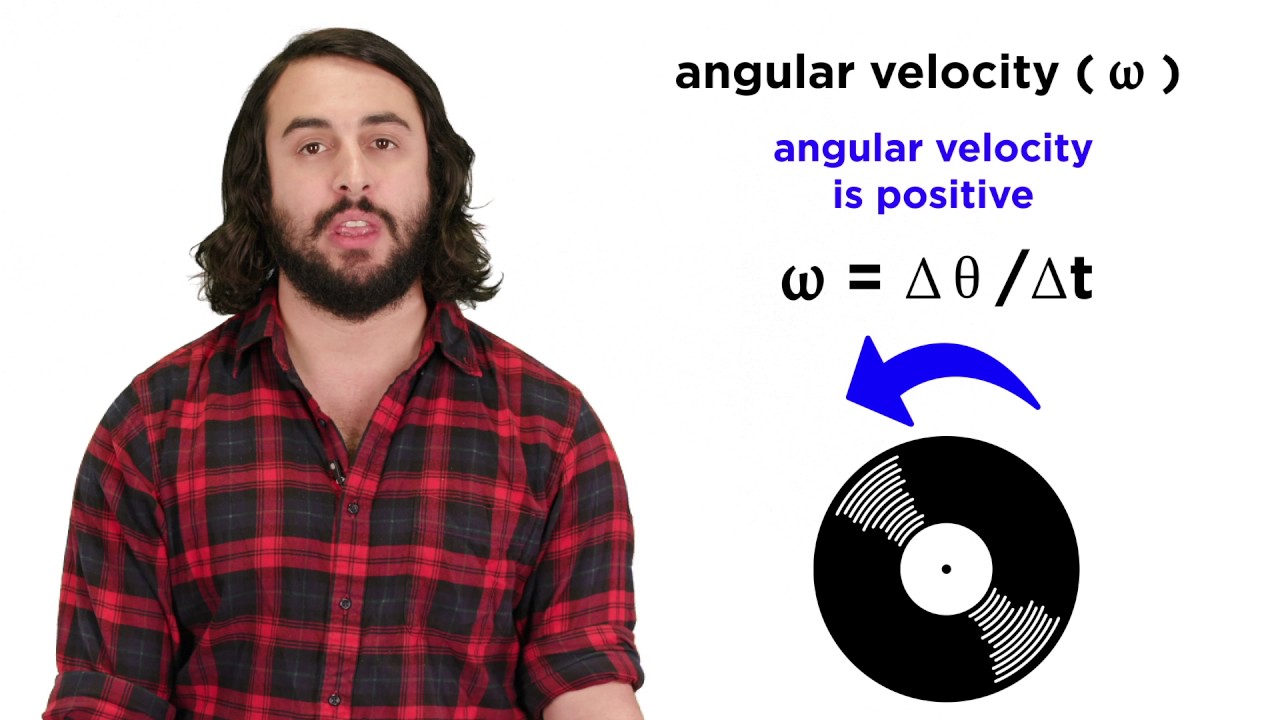
- 🚀 Both linear and angular velocities are vectors, with angular velocity (ω) being described using the right-hand rule.
- 🌐 Linear velocity (V) can be converted to angular velocity (ω) using the formula ω = V / r, and vice versa.
- 💫 The sample problem of Earth's angular velocity demonstrates how to convert time intervals from hours to seconds and calculate angular velocity in radians per second.
- 🏍️ The unicycle wheel problem illustrates the calculation of angular acceleration (α) from changes in angular velocity (ω) over a given time period.
- 🎢 The teddy bear picnic example highlights the calculation of linear velocity (V) from angular velocity (ω) and radius (r).
- 🥳 The roundabout scenario explains how to find the translational displacement (s) of an object undergoing rotational motion over a certain number of revolutions.
- 🛠️ The high-powered circular saw problem demonstrates the application of rotational kinematics to determine the time it takes for an object to reach a certain angular velocity with a given angular acceleration.
- 📚 The script emphasizes the importance of understanding the analogies between translational and rotational kinematics, as well as the application of kinematic equations in solving problems involving rotational motion.
Q & A
What is the relationship between radians and degrees?
-A circle has 360 degrees, and this is equivalent to 2 pi radians. Therefore, 1 radian is approximately 57.2958 degrees.
How do you convert 90 degrees to radians?
-To convert 90 degrees to radians, multiply 90 by (2 pi radians / 360 degrees), which results in (90 * 2 pi) / 360 = pi / 2 radians, or approximately 1.57 radians.
What is the definition of angular displacement?
-Angular displacement is the measure of the angle through which an object rotates around a circle, denoted by Delta Theta.
How is linear displacement related to angular displacement?
-Linear displacement (s) is related to angular displacement (theta) by the equation s = R * theta, where R is the radius of the circle.
What is the definition of angular velocity?
-Angular velocity (Omega) is the rate at which an object rotates around a circle, measured in radians per second.
How do you use the right-hand rule to determine the direction of angular velocity?
-To determine the direction of angular velocity using the right-hand rule, point your right hand in the direction of the object's velocity around the circle, and your thumb will point in the direction of the angular velocity vector.
How do you convert between linear velocity and angular velocity?
-Linear velocity (V) can be converted to angular velocity (Omega) by the equation Omega = V / R, and vice versa, V = Omega * R.
What is the definition of angular acceleration?
-Angular acceleration (alpha) is the rate of change of angular velocity, measured in radians per second squared.
How do you calculate the angular acceleration of an object?
-Angular acceleration (alpha) is calculated by the change in angular velocity (Delta Omega) divided by the time interval (T), or alpha = (Omega_final - Omega_initial) / T.
What is the relationship between linear acceleration and angular acceleration?
-Linear acceleration (a) is related to angular acceleration (alpha) by the equation a = R * alpha, and conversely, alpha = a / R.
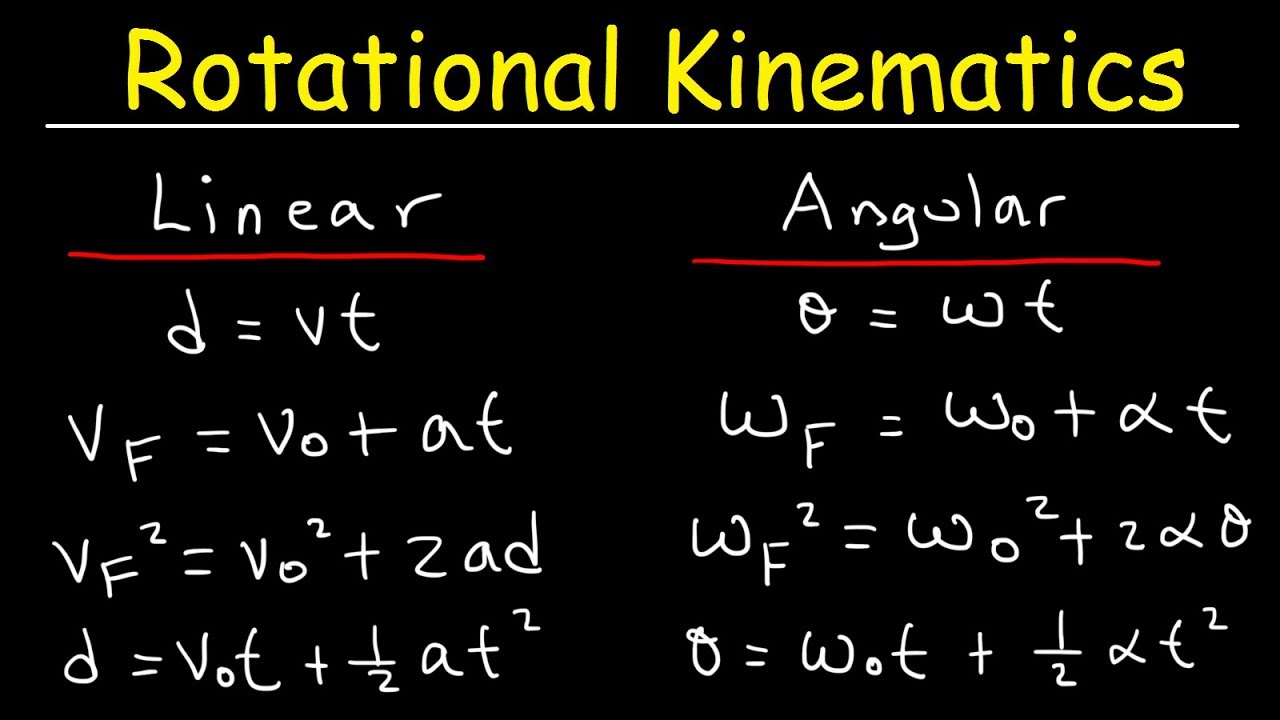
How do the kinematic equations for translational and rotational motion relate to each other?
-The kinematic equations for rotational motion are similar to those for translational motion, but with rotational variables (like Omega for angular velocity and alpha for angular acceleration) replacing their translational counterparts (like V for linear velocity and a for linear acceleration).
What is the maximum speed of a circular saw blade that accelerates from rest with an angular acceleration of 14 radians per second squared to a maximum speed of 15,000 rpms?
-The maximum speed of the saw blade in radians per second is 1570, calculated by converting 15,000 rpms to radians per second (15,000 * 2 pi / 60).
How long does it take for the circular saw blade to reach its maximum speed?
-It takes 112 seconds for the saw blade to reach its maximum speed, calculated using the kinematic equation for angular velocity (final Omega = initial Omega + alpha * time) and solving for time (time = (final Omega - initial Omega) / alpha).
Outlines
📚 Introduction to Rotational Kinematics
This paragraph introduces the topic of rotational kinematics and outlines the objectives of the lesson. The speaker, Dan Fullerton, aims to help the audience understand the analogy between translational and rotational kinematics, the right-hand rule for associating angular velocity with a rotating object, and how to apply equations of motion to solve various problems. The paragraph begins with a discussion on radians and degrees, explaining their relationship and conversion methods. It then moves on to define angular displacement and its analogy with linear displacement, and introduces the concepts of linear and angular velocity, including their vector nature and the use of the right-hand rule to determine the direction of angular velocity.
🌐 Conversions and Vectors in Rotational Motion
In this paragraph, the speaker continues to delve into the details of rotational motion, focusing on the conversion between linear and angular quantities. The explanation includes how to convert between linear and angular velocity, and how to determine the direction of vectors in three-dimensional space using the right-hand rule. The paragraph also provides examples of how to draw vectors coming out of or going into a plane. The speaker then discusses linear versus angular acceleration, their relationship, and how to convert between them using the radius of rotation. Two sample problems are presented to illustrate the concepts, one calculating Earth's angular velocity and the other finding the angular acceleration of a unicycle wheel.
🔄 Relationships and Kinematic Equations in Rotational Motion
This paragraph explores the relationships between translational and rotational variables, providing straightforward conversion formulas for displacement, velocity, and acceleration. The speaker explains how these patterns can be used to remember the relationships between the variables, and then introduces rotational kinematic equations that parallel the translational ones. The paragraph includes examples of how to apply these equations to solve problems, such as calculating the linear velocity of a character named Nikolas in a rotating scenario, and determining the translational displacement and angular acceleration of a knight named Nikolas on a spit.
🎢 Applying Kinematics to Real-World Scenarios
The final paragraph of the script applies the concepts of rotational kinematics to real-world scenarios, demonstrating how the principles can be used to solve practical problems. The speaker presents a series of problems involving different situations, such as a teddy bear ride at a picnic, a night character named Nikolas experiencing misfortune, and a carpenter using a high-powered circular saw. The problems cover calculations of linear velocity, angular acceleration, translational displacement, and the time it takes for an object to reach a certain speed. The paragraph concludes with a reminder of the importance of understanding rotational kinematics for the study of rotational motion and encourages further exploration of the topic.
Mindmap
Keywords
💡Rotational Kinematics
💡Radians
💡Angular Velocity (Omega)
💡Right-Hand Rule
💡Linear Velocity (V)
💡Angular Acceleration (Alpha)
💡Kinematic Equations
💡Conversion Factors
💡Circumference
💡Sample Problems
💡Vector
Highlights
Introduction to rotational kinematics and its analogy with translational kinematics.
Explanation of radians and degrees, and how they relate to each other with the circle's circumference.
Conversion of 90 degrees to radians using the relationship between degrees and radians.
Discussion on rotational motion, angular displacement, and its analogy to linear displacement.
Relationship between linear velocity (V) and angular velocity (Omega), and how they can be converted using the radius (R).
Description of the right-hand rule for determining the direction of angular velocity vector.
Conversion between linear and angular velocity, and the sample problem of calculating Earth's angular velocity.
Explanation of linear versus angular acceleration, and the right-hand rule for angular acceleration.
Sample problem of calculating the angular acceleration of a unicycle wheel.
Correlation between translational and rotational variables, and the straightforward conversion patterns.
Derivation of rotational kinematic equations from translational ones by replacing variables.
Sample problem of calculating the linear velocity of a knight (Nikolas) spinning in a circle.
Calculation of the translational displacement of Nikolas after two complete revolutions.
Discussion on the teddy bear picnic and the angular acceleration of a roundabout.
Calculation of the angular and linear acceleration of a roundabout at a given radius.
Sample problem of a high-powered circular saw with an angular acceleration reaching a maximum speed.
Calculation of the time it takes for the saw to reach its maximum speed given its angular acceleration.
Transcripts
Browse More Related Video
Angular Motion and Torque

AP Physics 1 - Rotational Kinetic Energy
Rotational Kinematics Physics Problems, Basic Introduction, Equations & Formulas
Rotational Motion: Crash Course Physics #11
angular velocity: what is it and how is it calculated

Rotational kinematic formulas | Moments, torque, and angular momentum | Physics | Khan Academy
5.0 / 5 (0 votes)
Thanks for rating: