Video 95 - Geodesic Curves
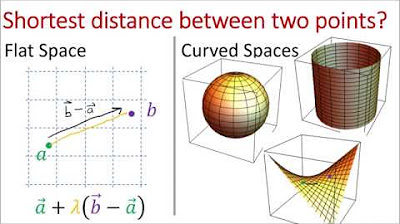
TLDRThis video delves into the concept of geodesics, a special type of curve on a surface with zero geodesic curvature tensor, meaning they have no surface projection, only a normal one. The presenter explains the differential equation defining geodesics and how using an affine parameter simplifies this equation. The video also explores the connection between geodesics and stationary paths derived from the Euler-Lagrange equation, highlighting that while geodesics are necessary for the shortest path, they aren't always sufficient, as multiple geodesics may exist between two points, with only one being the shortest.
Takeaways
- 📚 The script is part of a series on tensor calculus, focusing on geodesics, a special classification of curves.
- 🔍 A geodesic is defined as a curve where the geodesic curvature tensor equals zero, implying no surface projection, only a normal one.
- 📉 The condition for a curve to be a geodesic is analyzed in detail, starting with the definition of the geodesic curvature tensor introduced in a previous video.
- 🧩 The script expands the expression for geodesic curvature using covariant derivatives and simplifies it by choosing an affine parameter for the curve.
- 🔑 An affine parameter is one that is linear with respect to the arc length of the curve, simplifying the volume element and making it constant.
- 📐 The geodesic differential equation is derived, which is a necessary condition for a curve to be a geodesic when using an affine parameter.
- 🔍 The concept of a functional is introduced, contrasting it with a function, where the argument of a functional is the function itself, not specific values of arguments.
- 📈 The Euler-Lagrange equation is mentioned for finding extremal values of a functional, which is necessary for determining the shortest path or geodesic between two points on a manifold.
- 🌐 The script explains that geodesics are stationary paths that may or may not represent the shortest path, and that only the shortest geodesic is guaranteed to be the minimum length path.
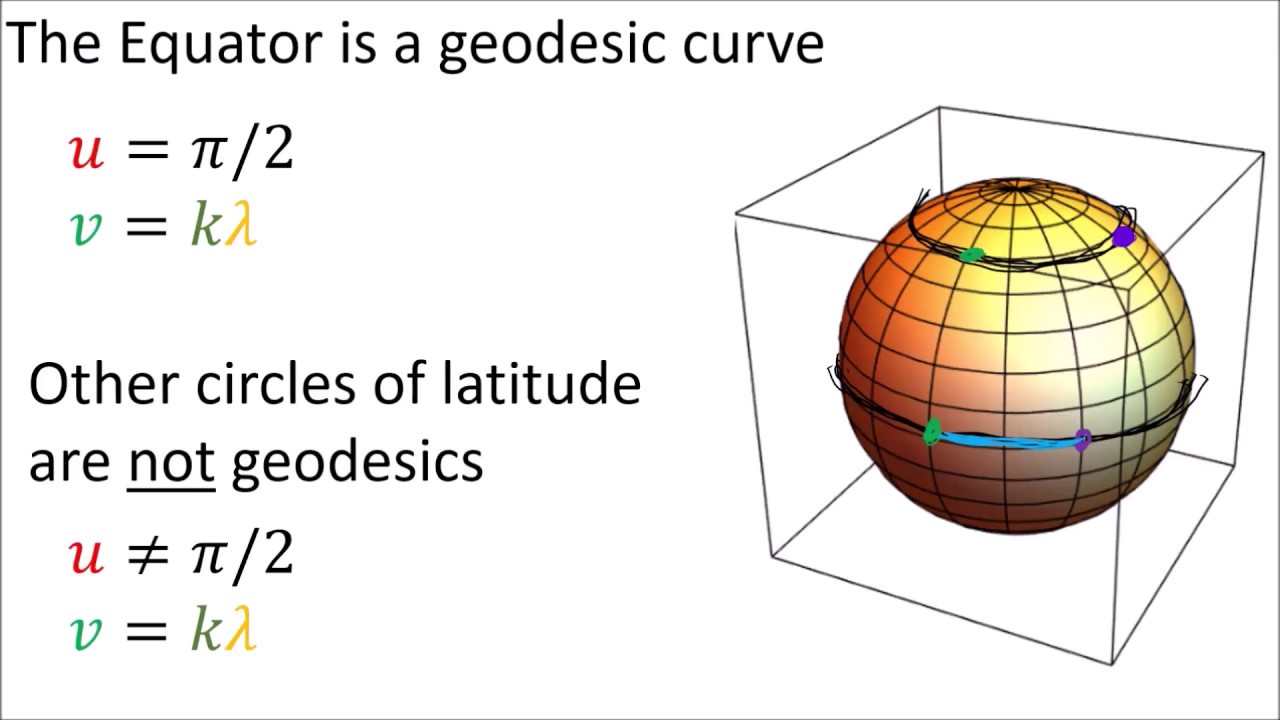
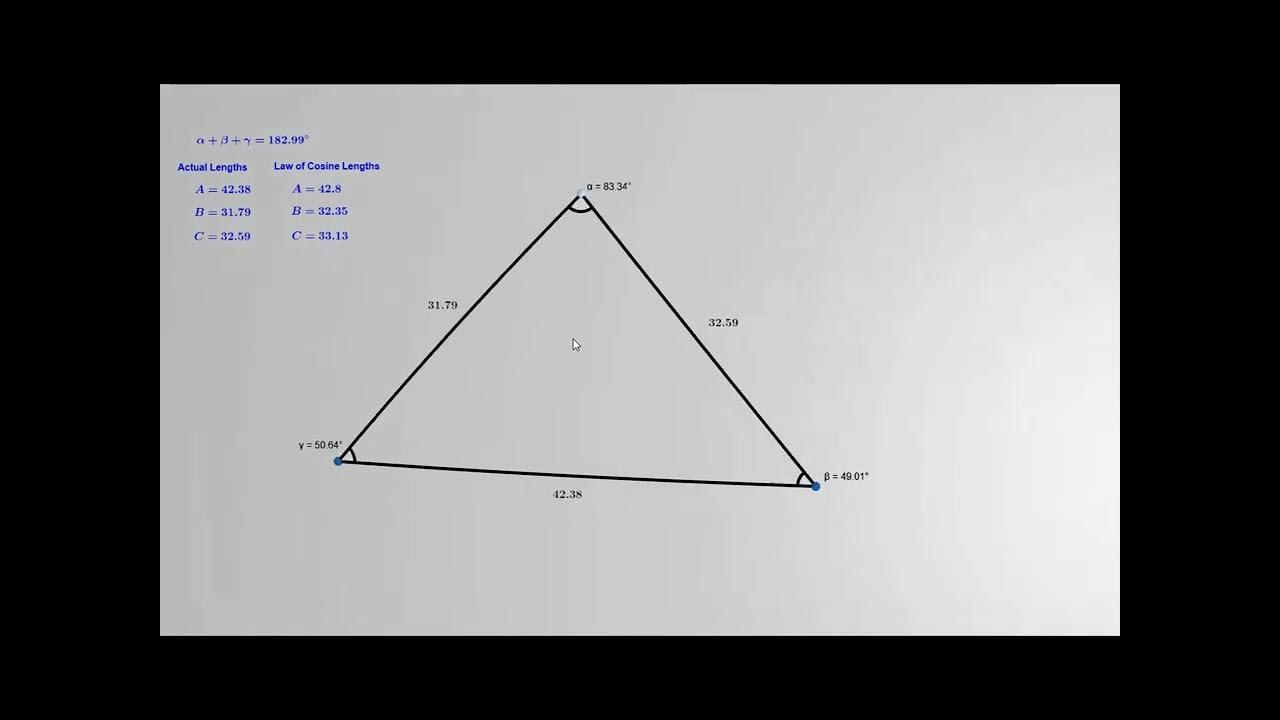
- 🌍 An example using a spherical surface illustrates that multiple geodesics can connect two points, but only one is the shortest path.
- 🔄 The final takeaway is a review and clarification that while every shortest path is a geodesic, not every geodesic is the shortest path, hence the need to find all geodesic connections and select the shortest.
Q & A
What is a geodesic in the context of tensor calculus?
-A geodesic is a special type of curve on a surface where the geodesic curvature tensor is equal to zero, indicating no surface projection but only a normal projection.
Why is the geodesic curvature tensor significant in analyzing curves?
-The geodesic curvature tensor is significant because when it equals zero, it indicates a geodesic curve, which has no surface curvature component and only a normal curvature component.
What is the relationship between the geodesic curvature tensor and the normal of a curve?
-When the geodesic curvature tensor is zero, the only projection of the curve is in the direction of the normal, meaning the curve lies entirely within the normal space of the surface.
How does the video script define the shift tensor s Alpha Phi?
-The shift tensor s Alpha Phi is defined as the partial derivative of s Alpha with respect to UV, which is a basic definition used in the analysis.
What is an affine parameter and why is it used in the context of geodesics?
-An affine parameter is a parameter that is linear with respect to the arc length of a curve. It is used because when an affine parameter is chosen, the volume element becomes a constant, simplifying the differential equation for geodesics.
What is the significance of the Euler-Lagrange equation in the context of geodesics?
-The Euler-Lagrange equation is used to determine the stationary paths, which are the necessary condition for the shortest path or geodesic between two points on a manifold.
How does the video script connect the Euler-Lagrange equation to the concept of stationary paths?
-The script shows that the geodesic differential equation can be derived from the Euler-Lagrange equation, indicating that geodesics are stationary paths that may represent extremal values for the functional of curve length.
What is the difference between a function and a functional in mathematics?
-A function takes specific values of arguments and produces a single numerical result, while a functional takes a function as its argument and produces a value based on the choice of the function itself, not specific values of the function.
Why is it incorrect to define a geodesic as the shortest path between two points on a manifold?
-It is incorrect because while the shortest path between two points is always a geodesic, not every geodesic is the shortest path. There can be multiple geodesics connecting two points, and only one of them may be the shortest.
What is the role of the metric tensor in the differential equation for geodesics?
-The metric tensor is used to express the differential equation in terms of the covariant derivative, which simplifies the equation when an affine parameter is chosen, allowing for the elimination of certain terms.
How does the video script illustrate that not all geodesics are the shortest path?
-The script uses the example of a spherical surface where two points can be connected by multiple geodesics, but only one of them is the shortest path, demonstrating that geodesics are not always the shortest.
Outlines
📚 Introduction to Geodesics in Tensor Calculus
This paragraph introduces the concept of geodesics, a special classification of curves, within the context of tensor calculus. It builds upon the previous video's explanation that a geodesic is a curve with zero geodesic curvature tensor, implying no surface projection and only a normal projection. The paragraph sets the stage for a deeper analysis of geodesics, starting with a review of the geodesic curvature tensor definition and the condition for it to be zero, which involves the covariant derivative and the normal in Alpha not being zero.
🔍 Detailed Analysis of Geodesic Curvature
The second paragraph delves into the mathematical details of geodesic curvature, expanding the expression for the geodesic curvature tensor using covariant derivative rules. It introduces the shift tensor and its relationship with the partial derivative. The paragraph then discusses the simplification of the differential equation for geodesics by choosing an affine parameter, which is linear with respect to the arc length of the curve. This choice leads to the volume element being constant, and consequently, u11 being a constant, which simplifies the geodesic condition.
📘 Exploring the Properties of Geodesics with Affine Parameters
This paragraph continues the exploration of geodesics by examining the implications of using an affine parameter. It explains how the Christoffel symbols become zero when using an affine parameter, which simplifies the differential form of a geodesic. The paragraph also touches on the Euler-Lagrange equation, which is central to finding extremal values in functionals, and its relevance to determining the shortest path or curve between two points in a manifold.
🧭 The Euler-Lagrange Equation and Stationary Paths
The fourth paragraph focuses on the Euler-Lagrange equation and its role in identifying stationary paths, which are essential for finding geodesics. It explains the concept of functionals and how they differ from functions, with functionals depending on the choice of functions rather than specific argument values. The paragraph also clarifies that the Euler-Lagrange equation provides necessary but not sufficient conditions for a minimum length path, highlighting the need for additional tests to determine if a stationary path is indeed the shortest.
🌐 Applying the Euler-Lagrange Equation to Geodesics
This paragraph applies the Euler-Lagrange equation to the context of geodesics, specifically to find the shortest path between two points on a manifold. It discusses the process of taking partial derivatives with respect to the first derivatives of the curve and setting up the equation to find the stationary path. The paragraph also simplifies the expression by using an affine parameter, which leads to a constant function f and simplifies the differentiation process.
🔗 Conclusion on Geodesics and Shortest Paths
The final paragraph concludes the discussion on geodesics by emphasizing their definition as curves with only a normal curvature component and no surface curvature component. It clarifies that while geodesics are necessary for the shortest path between two points, not all geodesics are the shortest path. The paragraph illustrates this with an example of a spherical surface, showing that multiple geodesics can connect two points, but only one is the shortest. It also reviews the key points discussed in the video, including the differential equation form of a geodesic and the relationship between geodesics and stationary paths.
Mindmap
Keywords
💡Geodesic
💡Geodesic Curvature Tensor
💡Covariate Derivative
💡Shift Tensor
💡Affine Parameter
💡Volume Element
💡Christoffel Symbol
💡Euler-Lagrange Equation
💡Functional
💡Stationary Path
Highlights
Introduction to geodesics as a special classification of curves with geodesic curvature tensor equal to zero, implying no surface projection.
Analysis of geodesics in greater detail, starting with the definition of geodesic curvature tensor.
Expansion of the geodesic curvature tensor expression using covariant derivative rules.
Substitution of the shift tensor definition into the geodesic curvature tensor expression to form a differential equation.
Simplification of the differential equation by choosing an affine parameter for the curve.
Explanation of an affine parameter and its relationship to the arc length of the curve.
Derivation of the volume element and its constancy when using an affine parameter.
Introduction to the Euler-Lagrange equation in the context of finding extremal values for functionals.
Application of the Euler-Lagrange equation to determine the shortest path or curve between two points on a manifold.
Differentiation between a geodesic and the shortest path, noting that not every geodesic is the shortest path.
Illustration of multiple geodesic paths on a spherical surface, highlighting that only one may be the shortest.
Redefinition of a geodesic as a path with only a normal curvature component, not necessarily the shortest path.
Differential form of a geodesic presented, emphasizing its validity under the condition of an affine parameter.
Review of the geodesic curve definition and its differential equation form.
Discussion on the necessity of finding all geodesic connections between two points to identify the shortest path.
Upcoming introduction of the concept of parallel transport in the next video.
Transcripts
Browse More Related Video
Tensor Calculus 15: Geodesics and Christoffel Symbols (extrinsic geometry)
Tensor Calculus 16: Geodesic Examples on Plane and Sphere
Tensor Calculus Lecture 15: Geodesic Curvature Preview
Video 81 - Intrinsic Curvature

The Mathematics of our Universe
Tensor Calculus 24: Ricci Tensor Geometric Meaning (Sectional Curvature)
5.0 / 5 (0 votes)
Thanks for rating: