Calculus Chapter 4 Lecture 36 Surface Area
TLDRIn this calculus lecture, Professor Greist explores the concept of surface area in three-dimensional space, contrasting it with two-dimensional area. He demonstrates how to calculate the surface area of a cone and a sphere by decomposing them into simpler shapes and integrating. The lecture delves into the surface area of revolution, using the arc length element to derive formulas for various shapes, including a ball and a parabola rotated around an axis. The professor also discusses the intriguing case of objects with finite volume but infinite surface area and introduces minimal surfaces, exemplified by the catenoid, a shape that minimizes surface area for a fixed boundary.
Takeaways
- 📚 The lecture introduces the concept of surface area in three-dimensional space, specifically for shapes that are wavy or curved.
- 📐 It explains how to compute the surface area of a cone by decomposing it into triangles and integrating, resulting in a formula of \( \pi R L \) where \( R \) is the radius and \( L \) is the slant height.
- 🌀 The process of finding the surface area of a surface of revolution is discussed, which involves taking a vertical slice of the surface and considering it as a cone with a varying radius.
- 🔍 The differentiation between the slant length \( L \) and the differential \( dL \) is highlighted, with the latter being crucial for the surface area element.
- 📉 The formula for the surface area element of a surface of revolution is simplified to \( 2\pi R dL \), which is directly related to the arc length element.
- 🏀 An interesting problem about the surface area of slices of a ball is presented, revealing that all slices have the same surface area regardless of their position.
- 🌐 The concept of the Lambert cylindrical projection in cartography is mentioned, which is a method to represent the world on a flat map with preserved areas but distorted lengths.
- 📚 The volume and surface area of a solid formed by rotating the curve \( 1/x^p \) around the x-axis are explored, leading to the discovery of conditions for finite and infinite values.
- 🔮 A counterintuitive result is presented where an object can have finite volume but infinite surface area, depending on the value of \( p \).
- 🍲 The surface area of a bowl-shaped region formed by rotating a parabola around the y-axis is calculated, showcasing an alternative integration approach.
- 🌊 The catenoid, a minimal surface formed by rotating a catenary, is introduced, and its surface area is discussed as an example of a more complex integral.
Q & A
What is the main topic of Professor Greist's lecture 36?
-The main topic of lecture 36 is the computation of surface area in three-dimensional space, specifically for shapes such as cones and surfaces of revolution.
How does Professor Greist suggest computing the surface area of a cone?
-Professor Greist suggests decomposing the surface of the cone into triangles and integrating. The surface area element is approximated by 1/2 the base times the height, and integrating from 0 to 2π gives the total surface area as πRL.
What is the relationship between the surface area element and the arc length element in the context of a surface of revolution?
-The surface area element for a surface of revolution can be simplified to twice PI R DL, where DL is the arc length element, and R is the radius of the circular slice at a fixed x value.
How does the surface area element formula for a surface of revolution relate to the curve's function in the xy-plane?
-The radius R is typically given in terms of y of X, where the curve is a function of Y of X. This allows the use of the arc length element formula for the curve to determine the surface area element.
What is the surface area element formula for a round ball divided into slices of equal width?
-The surface area element for a round ball divided into slices is 2πRdX, which is independent of the slice's position, meaning all slices have the same surface area.
How does the concept of surface area relate to the Lambert cylindrical projection in cartography?
-The Lambert cylindrical projection is a solution to create a map of the world where all areas are preserved as on the surface of a ball, even though the map is flat. This concept is based on the understanding of surface area from slicing a round ball.
What is the volume of the solid obtained by rotating the curve 1/X^P from 1 to infinity about the x-axis, given P > 1/2?
-The volume of the solid is finite when P is strictly greater than 1/2, and it can be calculated using the integral of π times the radius to the power of -2P times DX from 1 to infinity.
What is the condition for the surface area of the solid obtained by rotating the curve 1/X^P to be finite?
-The surface area of the solid obtained by rotating the curve 1/X^P is finite when P is strictly greater than 1, which is a different condition than for the volume.
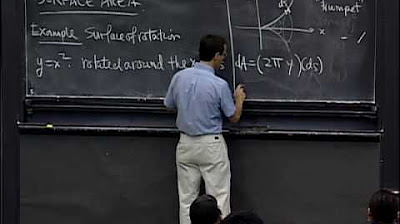
What is the surface area of a bowl-shaped region obtained by rotating the parabola y = x^2 about the y-axis from x = 0 to x = 1?
-The surface area of the bowl-shaped region is PI over 6 times the square root of 5 minus 1, which can be obtained by integrating the surface area element 2π times the square root of y plus 1/4 dY from 0 to 1.
What is a catenoid and why is it significant in the context of minimal surfaces?
-A catenoid is the shape obtained by rotating a catenary (the curve formed by a hanging chain or rope) about an axis. It is significant as an example of a minimal surface, which minimizes surface area for a fixed boundary.
How does the lecture illustrate the concept of a solid with finite volume but infinite surface area?
-The lecture illustrates this concept by discussing the rotation of the curve 1/X^P about the x-axis, where for P values between 1/2 and 1, the resulting solid has finite volume but infinite surface area.
Outlines
📚 Introduction to Surface Area in Calculus
Professor Greist begins Lecture 36 by introducing the concept of surface area, specifically in the context of three-dimensional shapes. Unlike flat two-dimensional areas, surface area encompasses wavy or curved shapes. The lecture focuses on the relationship between the surface area element and the arc length element. A cone's surface area over a circle is used as an example, where the area is computed by decomposing the surface into triangles and integrating. The formula derived is πRL, where R is the radius and L is the slant height. This method is then applied to the surface area of a surface of revolution, obtained by revolving a curve around an axis, and the surface area element is simplified to 2πy√(1+(dy/dx)^2)dx, highlighting the importance of the arc length element in determining surface area.
🌐 Surface Area of a Sphere and Lambert Projection
The lecture continues with an exploration of the surface area of a sphere, dividing it into slices of equal width and questioning which slice has the most surface area. By considering the sphere as a surface of revolution of the curve y = √(R^2 - x^2), the surface area element is shown to be constant across all slices, indicating equal surface area for each. This leads to a discussion on the Lambert cylindrical projection, a cartographic method that preserves areas despite distorting lengths. The lecture then moves on to compute the volume and surface area of a solid formed by revolving the curve 1/x^p from x=1 to infinity around the x-axis, revealing conditions for convergence and divergence of improper integrals.
🔍 Contrasting Finite Volume with Infinite Surface Area
In this section, Professor Greist delves into the intriguing concept of an object having a finite volume but an infinite surface area, which is counterintuitive but mathematically sound. The analysis involves examining the leading order term of the surface area element for a curve rotated around the x-axis and determining the conditions under which the integral converges or diverges. The result is that for certain values of the parameter p, specifically between 1/2 and 1, the object's volume can be finite while its surface area is infinite, showcasing the fascinating properties of improper integrals and their applications in geometry.
🛸 Surface Area of a Parabola and a Catenoid
The final part of the lecture presents two more examples of calculating surface area: a parabola rotated about the y-axis and a catenoid, which is the surface formed by rotating a catenary curve around an axis. For the parabola y = x^2, the surface area is computed by integrating the surface area element 2π√(y + 1/4)dY from Y=0 to Y=1, yielding a specific numerical result. The catenoid example introduces the concept of minimal surfaces, which minimize surface area for a given boundary, and provides the surface area element for a catenary rotated around an axis. Although the integral for the catenoid's surface area is complex and not computed in the lecture, it serves as an introduction to the topic of minimal surfaces and their applications.
Mindmap
Keywords
💡Surface Area
💡Surface of Revolution
💡Arc Length Element
💡Cone
💡Integral
💡Slant Length (L)
💡Differentiation Operator
💡Hypotenuse
💡Catenoid
💡Lambert Cylindrical Projection
Highlights
Introduction to the concept of surface area and its relation to the arc length element.
Computing the surface area of a cone using integration and surface area elements.
Explaining the surface area of a surface of revolution obtained by revolving a curve in the xy-plane about the x-axis.
Derivation of the surface area element for a cone with a slant height L and radius R.
Simplifying the surface area element to twice PI R DL, using the arc length element and given R in terms of y of X.
Applying the arc length element formula to compute the surface area for a round ball of radius R.
Concluding that all slices of equal width in a ball of radius R have the same surface area.
Exploring the Lambert cylindrical projection in cartography, which preserves area despite flattening the surface.
Calculating the surface area and volume for a curve 1/x^p rotated about the x-axis, leading to the concept of improper integrals.
Finding that for certain values of p, an object can have finite volume but infinite surface area.
Using horizontal slicing to compute the surface area of a parabola y = x^2 rotated about the y-axis.
Performing the integration for surface area of the parabola and obtaining a specific result.
Discussing alternative methods of integration for the same problem, showing flexibility in approach.
Introducing the catenoid, formed by rotating a catenary about an axis, and its properties as a minimal surface.
Mentioning practical applications like the soap film experiment to visualize the catenoid shape.
Transcripts
Browse More Related Video
Lec 31 | MIT 18.01 Single Variable Calculus, Fall 2007
Three-Dimensional Shapes Part 1: Types, Calculating Surface Area

Lecture 08: Circles, Pyramids, Cones and Spheres

Lesson 9 - Area Of A Surface Of Revolution (Calculus 2 Tutor)

The Math of Bubbles // Minimal Surfaces & the Calculus of Variations #SoME3
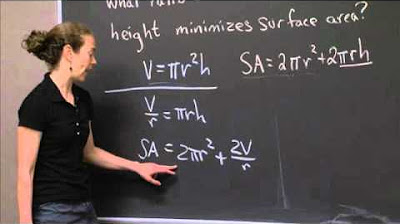
Maximum Surface Area | MIT 18.01SC Single Variable Calculus, Fall 2010
5.0 / 5 (0 votes)
Thanks for rating: