Cross product and torque | Moments, torque, and angular momentum | Physics | Khan Academy
TLDRThis educational video script explores the concept of torque as a vector, emphasizing its directionality. It explains torque's calculation using the cross product of the radial distance and the rotational force vector, highlighting the significance of sine in determining the perpendicular force component. The script uses a 30-60-90 triangle to illustrate torque magnitude and the right-hand rule to determine the direction of the torque vector, which is found to point out of the page in the example provided.
Takeaways
- 😀 Torque is a vector quantity, not just a scalar, and it has both magnitude and direction.
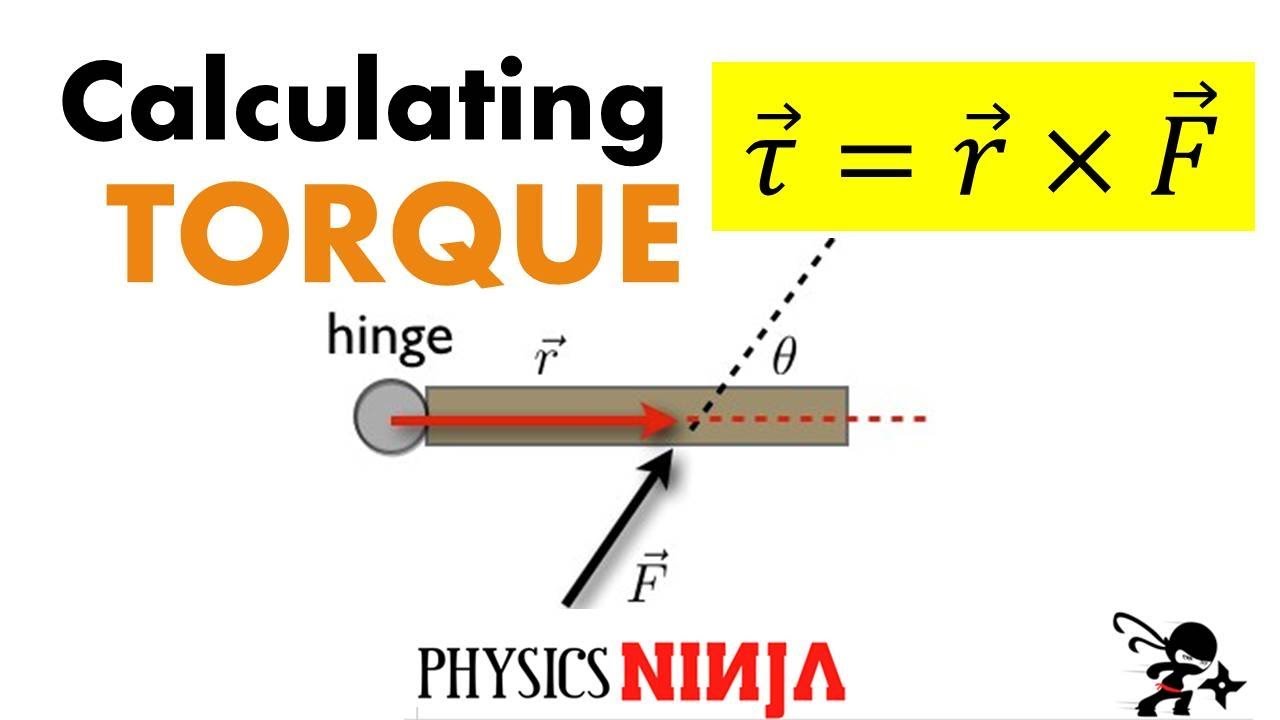
- 🔍 Torque is calculated using the cross product of the radial distance from the axis of rotation and the rotational force applied.
- 📐 The radial distance (r) and the force (F) are both vector quantities, and the cross product accounts for their magnitudes and the angle between them.
- 📏 The magnitude of torque is found by multiplying the perpendicular component of the force (Fsinθ) by the distance (r) from the pivot.
- 📚 A right-angled triangle can be used to determine the perpendicular component of the force using trigonometry, specifically sine for the angle θ.
- 📉 The example in the script uses a force of √3 newtons applied at an angle of π/3 radians (or 60 degrees) to a lever arm of 10 meters.
- 🔢 The magnitude of the torque in the example is calculated to be 15 newton meters (3/2 newtons * 10 meters).
- 🧭 The direction of the torque is found using the right-hand rule, which indicates whether the torque vector points into or out of the page.
- 🤔 The right-hand rule involves aligning the index finger and middle finger to represent the vectors r and F, with the thumb indicating the direction of the torque vector.
- 📌 In the script's example, the torque vector is determined to point out of the page, represented by a unit vector with a dot.
- 🔄 The concept of torque as a pseudovector is mentioned, hinting at its directional properties in three-dimensional space.
Q & A
What is torque and how is it defined?
-Torque is a vector that represents the rotational force applied at a distance from the axis of rotation. It is defined as the cross product of the radial distance from the axis of rotation and the force applied.
Why is torque considered a vector quantity?
-Torque is considered a vector because it has both magnitude and direction. The direction of torque can be found using the right-hand rule and is perpendicular to both the radial distance vector and the force vector.
How do you calculate the magnitude of torque?
-The magnitude of torque is calculated by multiplying the component of the force that is perpendicular to the radial distance by the length of the radial distance. This can be expressed as τ = r * F * sin(θ), where r is the radial distance, F is the force, and θ is the angle between them.
What role does the angle between the force and the radial distance play in calculating torque?
-The angle between the force and the radial distance determines the component of the force that is perpendicular to the radial distance. Only this perpendicular component contributes to the torque.
How do you determine the direction of the torque vector?
-The direction of the torque vector is determined using the right-hand rule. Point your index finger in the direction of the radial distance (r) and your middle finger in the direction of the force (F). Your thumb will then point in the direction of the torque vector.
What is the right-hand rule and how is it used in this context?
-The right-hand rule is a method to determine the direction of the cross product of two vectors. In the context of torque, you point your right-hand index finger in the direction of the radial distance and your middle finger in the direction of the force. The direction your thumb points indicates the direction of the torque vector.
What is the significance of the unit vector in the cross product calculation for torque?
-The unit vector in the cross product calculation specifies the direction of the torque vector. It is perpendicular to both the radial distance vector and the force vector, and its magnitude is 1.
Why is it important to consider only the perpendicular component of the force when calculating torque?
-Only the perpendicular component of the force contributes to the rotation around the pivot. The parallel component does not create any rotational effect and therefore does not affect the torque.
How does the example provided in the script illustrate the calculation of torque?
-The example uses a radial distance of 10 meters and a force of sqrt(3) newtons applied at an angle of pi/3 radians. By calculating the perpendicular component of the force and multiplying it by the radial distance, the script demonstrates how to find the magnitude of the torque.
What is a pseudovector, and why might torque be referred to as one?
-A pseudovector, or axial vector, behaves like a vector under certain transformations but may change sign under reflection. Torque is referred to as a pseudovector because it represents rotational quantities and has a direction determined by the right-hand rule, which can be considered somewhat arbitrary.
Outlines
🔧 Understanding Torque as a Vector
This paragraph introduces the concept of torque as not just a scalar quantity but also a vector, with both magnitude and direction. The speaker explains that torque is the cross product of the radial distance from the axis of rotation and the rotational force applied, emphasizing that torque's direction can be determined. The explanation includes a practical example involving a lever arm with a force applied at a distance, creating a moment around a pivot. The paragraph also discusses the importance of considering only the component of force that is perpendicular to the lever arm when calculating torque, using trigonometry to find this component in a specific example with given values for force, distance, and angle.
📐 Calculating Torque Magnitude and Direction
The second paragraph delves deeper into the calculation of torque, focusing on both its magnitude and direction. The speaker uses the previously introduced example and applies the cross product formula to find the torque's magnitude, resulting in 15 newton meters. The explanation then shifts to determining the direction of the torque vector, introducing the concept of the cross product involving a unit vector perpendicular to both the radial distance and the force vector. The right-hand rule is employed to ascertain the direction of this unit vector, which is found to be perpendicular to the plane of the page, pointing 'out of the page'. The paragraph concludes with a visual representation of this direction using a circle with a dot, signifying the torque vector's direction in three-dimensional space.
Mindmap
Keywords
💡Torque
💡Vector
💡Cross Product
💡Magnitude
💡Direction
💡Pivot
💡Moment Arm
💡Force Component
💡Trigonometry
💡Right Hand Rule
💡Unit Vector
Highlights
Torque is a vector with both magnitude and direction, which is not always considered in basic physics problems.
Torque is defined as the cross product between the radial distance from the axis of rotation and the rotational force applied.
The direction of torque can be found using the cross product, which involves both vectors of radial distance and force.
A practical example of torque is provided using an arm rotating around a pivot, illustrating the concept with a visual.
The magnitude of the torque is calculated by multiplying the perpendicular component of the force to the moment arm.
A specific example calculates torque with a force of √3 newtons applied at an angle of pi/3 radians from the arm.
The component of force perpendicular to the arm is derived using trigonometry in a 30-60-90 triangle scenario.
The magnitude of the torque vector is the product of the perpendicular force component and the distance from the pivot.
The cross product formula is introduced to find both the magnitude and direction of the torque vector.
The right-hand rule is explained to determine the direction of the torque vector, which is perpendicular to the plane of force and arm.
A demonstration using the right-hand rule shows that the torque vector points out of the page in the given example.
The concept of a unit vector is introduced to represent the direction of the torque vector.
The torque vector is visualized as a pseudovector, emphasizing its directional property.
The video concludes by summarizing the application of the cross product to determine the torque vector's magnitude and direction.
The educational approach uses visual aids and step-by-step explanations to clarify the physics of torque.
The video aims to deepen the understanding of torque beyond just its magnitude, incorporating its vector nature.
Practical applications and real-world examples are used to make the concept of torque more relatable and understandable.
The video serves as an educational resource for students learning about torque in physics.
Transcripts
Browse More Related Video
Calculating Torque
What is Torque? | Physics | Extraclass.com
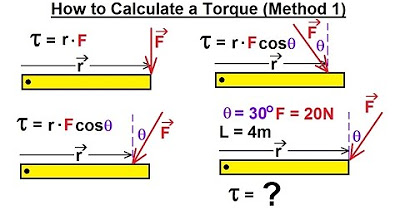
Physics 15 Torque Fundamentals (4 of 13) How to Calculate a Torque (Method 1)
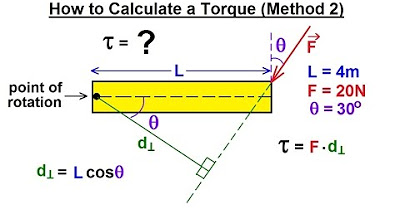
Physics 15 Torque Fundamentals (5 of 13) How to Calculate a Torque (Method 2)
torque explained
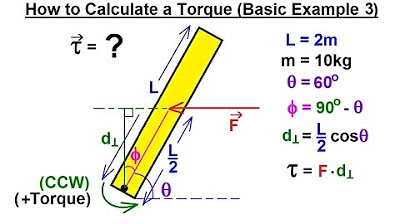
Physics 15 Torque Fundamentals (9 of 13) How to Calculate a Torque (Basic Example 3)
5.0 / 5 (0 votes)
Thanks for rating: