Modern Robotics, Chapter 2.2: Degrees of Freedom of a Robot
TLDRThis video script explores the concept of degrees of freedom in robotics, emphasizing the importance of joints and constraints in determining a robot's mobility. It introduces various types of joints, such as revolute, prismatic, universal, spherical, helical, and cylindrical, each with distinct degrees of freedom. Grubler's formula is highlighted as a method to calculate a robot's degrees of freedom by considering the number of links, joints, and the constraints they impose. The script applies this formula to different mechanisms, including serial robots, four-bar linkages, and the Stewart platform, highlighting the complexities of joint constraints and their impact on mobility. The video concludes with a teaser about the upcoming discussion on the topology of configuration space in robotics.
Takeaways
- 🔩 The number of degrees of freedom of a robot is calculated by subtracting the constraints imposed by joints from the total number of freedoms of the rigid bodies.
- 🔧 Revolute joints, the most common type, place 5 constraints on the motion, leaving one degree of freedom relative to the connected body.
- 📏 Prismatic joints, also with one degree of freedom, are known as linear joints and allow for sliding motion.
- 🔄 Universal joints have two degrees of freedom, allowing for more complex motions than revolute or prismatic joints.
- 🏀 Spherical joints, or ball-and-socket joints, provide three degrees of freedom, including rotation around the joint's axis.
- 📊 Grubler's formula is a mathematical expression used to calculate the degrees of freedom of most robots, assuming independent joint constraints.
- 🤖 Serial or open-chain robots, like the 3R robot, have a single path from the ground to the end effector and can be easily analyzed with Grubler's formula.
- 🔗 Four-bar linkages are closed-chain mechanisms with a loop, and despite having more joints, they still maintain one degree of freedom.
- 🚫 Grubler's formula may not apply when joint constraints are not independent, as seen in mechanisms with additional links and joints beyond the four-bar linkage.
- 🌐 The Stewart platform is an example of a spatial closed-chain mechanism with 6 legs, each with complex joints, resulting in 6 degrees of freedom for the top platform.
- 📚 The next video will explore the topology of configuration space, which is another important property for understanding robot motion and constraints.
Q & A
What is the formula to determine the number of degrees of freedom of a robot?
-The formula to determine the number of degrees of freedom of a robot is given by N - 1 minus the total number of constraints provided by the J joints, where constraints by joint i is m minus the number of freedoms allowed by joint i, and m is the degrees of freedom of a single body (3 for planar motion and 6 for spatial motion).
What is a revolute joint, and how does it affect the degrees of freedom of a robot?
-A revolute joint is a type of joint that allows for rotation around a single axis. It places 5 constraints on the motion of the second spatial rigid body relative to the first, resulting in only one degree of freedom given by the angle of the revolute joint.
What is a prismatic joint and how does it differ from a revolute joint?
-A prismatic joint, also known as a linear joint, allows for linear motion along a single axis. Unlike the revolute joint, which allows for rotation, the prismatic joint has one degree of freedom but in a linear direction.
What is a universal joint and how many degrees of freedom does it have?
-A universal joint is a type of joint that allows for two degrees of freedom. It combines the motion capabilities of a revolute joint and a prismatic joint, allowing for rotation and linear motion in two different planes.
How does a spherical joint differ from other joints in terms of degrees of freedom?
-A spherical joint, also known as a ball-and-socket joint, has three degrees of freedom. It allows for rotation around two axes and spinning about the axis, providing more freedom of motion compared to revolute, prismatic, or universal joints.
What is Grubler's formula and what does it assume about the joints?
-Grubler's formula is a mathematical formula used to calculate the degrees of freedom of a mechanical system. It assumes that the constraints provided by the joints are independent, meaning that each constraint does not affect the others.
How does a serial robot differ from an open-chain robot?
-A serial robot and an open-chain robot refer to the same type of mechanism. The terms are used interchangeably to describe a robot that has a single path from the ground to the end of the robot, with the motion being controlled by a series of connected links and joints.
What is a closed-chain mechanism and how does it differ from an open-chain mechanism?
-A closed-chain mechanism is a type of mechanical system where the end effector is connected back to the base or frame, forming a closed loop. This differs from an open-chain mechanism, where the end effector is not connected back to the base, creating an open path from the base to the end effector.
Why might Grubler's formula not apply to certain mechanisms?
-Grubler's formula might not apply to certain mechanisms when the joint constraints are not independent. In such cases, the formula's assumption that each constraint can be counted separately without affecting the others is violated.
What is the Stewart platform and how does it utilize joints to achieve motion?
-The Stewart platform is a spatial closed-chain mechanism with 6 legs connecting a bottom platform to a top platform. Each leg consists of two links and a combination of a universal joint, a prismatic joint, and a spherical joint. The prismatic joints are actuated to create motion of the top platform in 3-dimensional space.
How does the range of motion of a mechanism affect its degrees of freedom?
-The range of motion of a mechanism refers to the limits within which the mechanism can move. However, these limits do not reduce the number of degrees of freedom. The degrees of freedom are determined by the number of independent motions that the mechanism can perform, which is a fundamental property independent of the range of motion.
What is topology and why is it an important property of a configuration space in robotics?
-Topology is a branch of mathematics that studies the properties of space that are preserved under continuous transformations. In robotics, the topology of a configuration space is important because it affects the robot's ability to navigate through different positions and orientations without collisions or singularities.
Outlines
🤖 Robot Degrees of Freedom and Joint Types
This paragraph explains the concept of degrees of freedom in robotics, which is the number of independent parameters that define the position and orientation of a robot. It introduces the formula for calculating the degrees of freedom by subtracting the constraints imposed by joints from the total freedoms of the rigid bodies involved. The paragraph details different types of joints, such as revolute, prismatic, universal, spherical, helical, and cylindrical joints, each with varying degrees of freedom. Grubler's formula is introduced as a method to calculate the degrees of freedom for most robots, considering the number of links (including the ground), joints, and the degrees of freedom of a single body in either planar or spatial motion. The formula is then applied to different mechanisms, such as a 3R serial robot, a four-bar linkage, and a more complex mechanism with additional links and joints, to illustrate its use. The paragraph also touches on the limitations of Grubler's formula when joint constraints are not independent, as seen in the case of the Stewart platform, a spatial closed-chain mechanism with six legs, each with multiple joints and degrees of freedom.
🔄 Degrees of Freedom in Spatial Mechanisms
The second paragraph delves into the application of Grubler's formula to spatial mechanisms, specifically focusing on the Stewart platform. It provides a detailed account of the platform's structure, which consists of six legs connecting the bottom and top platforms, each leg having two links and a combination of universal, prismatic, and spherical joints. The paragraph explains that the prismatic joints are actuated, enabling motion of the top platform. The total number of links and joints in the mechanism is calculated, and the degrees of freedom for the mechanism are determined using Grubler's formula, which accounts for the constraints and freedoms provided by the joints and the spatial movement of the mechanism. The paragraph concludes by emphasizing that while there are limits to the range of motion of the platform, these limits do not affect the calculated number of degrees of freedom. It also sets the stage for the next video, which will explore the topology of configuration space, an important property for understanding the behavior and capabilities of robotic mechanisms.
Mindmap
Keywords
💡Degrees of Freedom
💡Revolute Joint
💡Prismatic Joint
💡Universal Joint
💡Spherical Joint
💡Helical Joint
💡Cylindrical Joint
💡Grubler's Formula
💡Serial Robot
💡Four-Bar Linkage
💡Stewart Platform
Highlights
The number of degrees of freedom of a robot is calculated by subtracting the number of constraints from the total number of freedoms of the rigid bodies.
Constraints on motion often come from joints, with the revolute joint being the most common type.
A revolute joint places 5 constraints on the motion and provides one degree of freedom.
The prismatic joint, also known as a linear joint, is another common joint with one degree of freedom.
Joints with more than one degree of freedom, such as the universal joint, are also possible.
The spherical joint, or ball-and-socket joint, offers three degrees of freedom.
A table summarizes various joints and their respective degrees of freedom and constraints.
A simple expression to count the degrees of freedom of robots is derived from the formula in Chapter 2.1.
The robot's degrees of freedom can be calculated using Grubler's formula, assuming independent joint constraints.
A serial or open-chain robot, such as a 3R robot, has three revolute joints and three degrees of freedom.
A four-bar linkage is a closed-chain mechanism with one degree of freedom despite having four joints.
Grubler's formula may not apply if joint constraints are not independent, as seen in certain mechanisms.
The Stewart platform is a spatial closed-chain mechanism with six degrees of freedom.
The Stewart platform uses 6 legs with complex joints to provide motion to the top platform.
Grubler's formula calculates the Stewart platform's degrees of freedom as 6, accounting for its spatial movement.
The range of motion limitations do not affect the calculated number of degrees of freedom.
The next video will explore the topology of configuration space, another important property.
Transcripts
Browse More Related Video
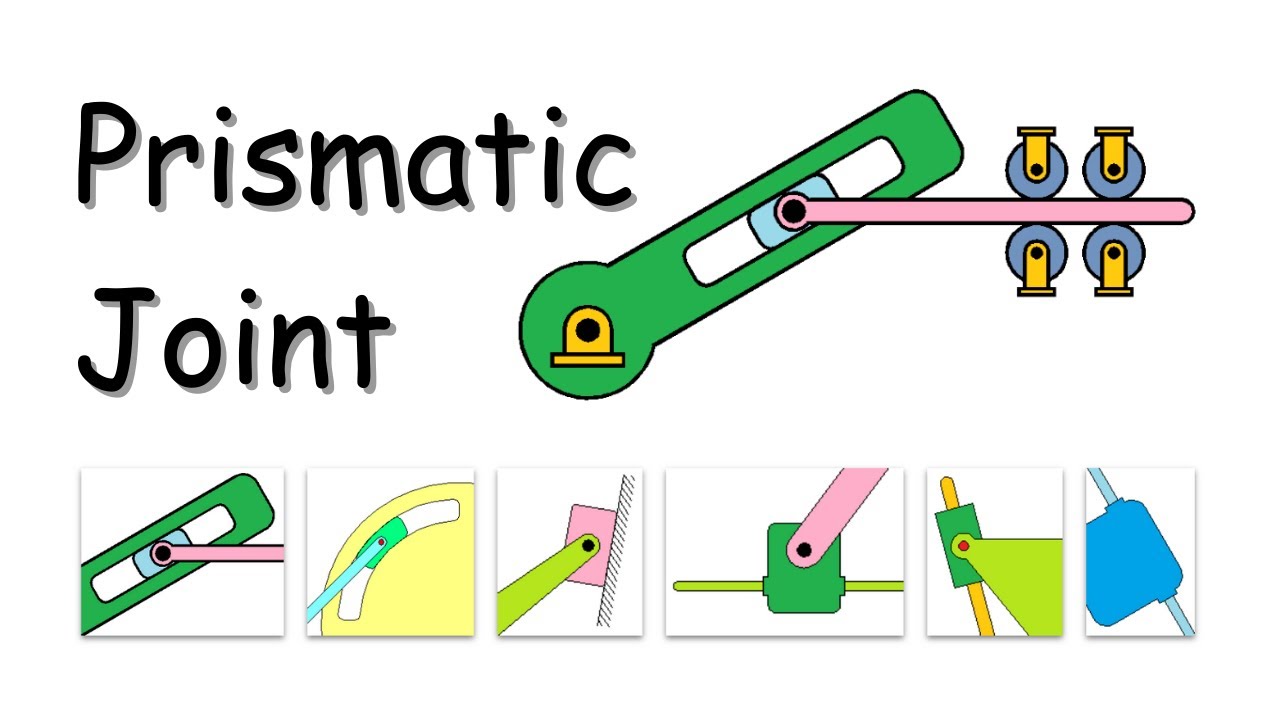
Understand prismatic joint and how it affects the degrees of freedom in a system
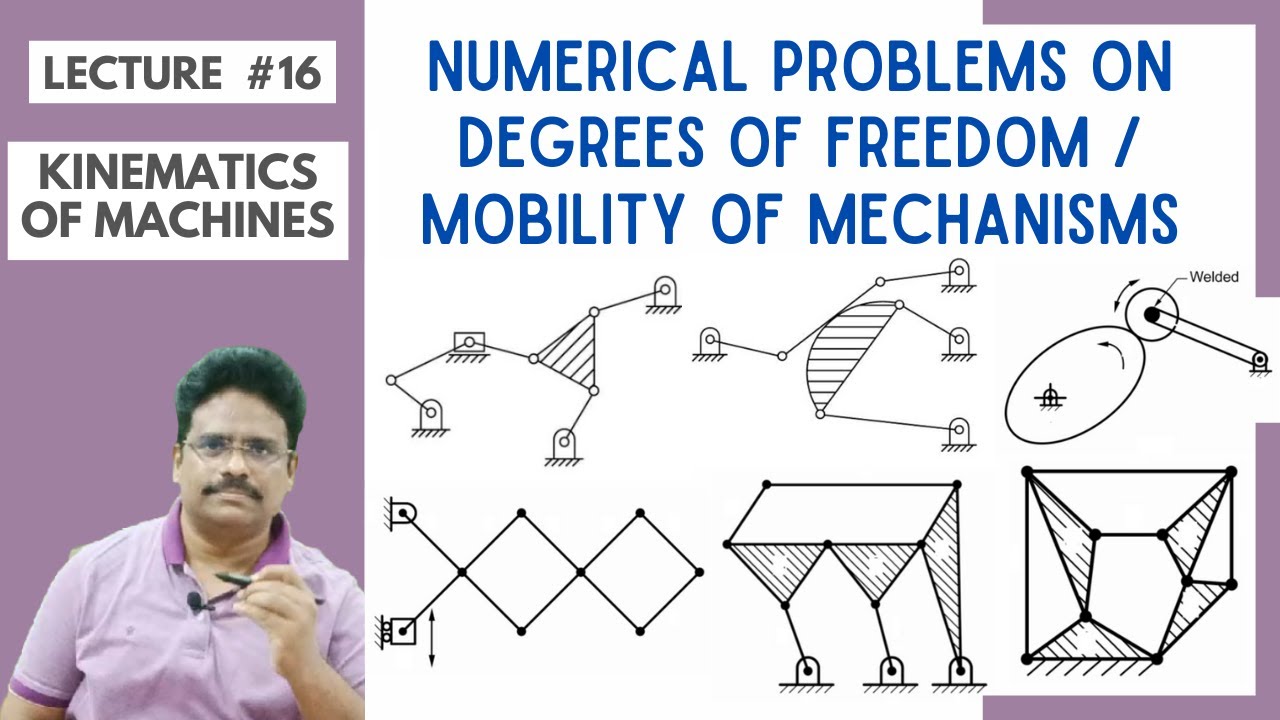
Lecture 16: 10 Numerical Problems on Degrees of Freedom/Mobility of Planar Mechanisms | Kutzback |

Degrees Of Freedom Explained | What is Degrees of freedom | Degrees of freedom in statistics

7. Degrees of Freedom, Free Body Diagrams, & Fictitious Forces
Lagrangian Mechanics II: Degrees of freedom, generalized coordinates and a cylinder

Degrees of Freedom
5.0 / 5 (0 votes)
Thanks for rating: