Understand prismatic joint and how it affects the degrees of freedom in a system
TLDRThe lecture delves into the concept of the 'prismatic' joint, a kinematic constraint that allows one body to slide along another. It explains the joint's function with examples like the Crank-Slider mechanism, illustrating how it affects the degrees of freedom (DOF) in a system. The formula for calculating DOF is expanded to include prismatic joints, which, like revolute joints, reduce DOF by two. Through various examples, the lecture clarifies the impact of these joints on mechanical systems, emphasizing the importance of understanding kinematic constraints in engineering design.
Takeaways
- 🔧 The 'prismatic' joint is a type of kinematic constraint that allows for linear motion between two rigid bodies.
- 📏 A prismatic joint is characterized by a slot on one body and a corresponding slider on another body, restricting motion to a straight line or curve.
- 🚫 The prismatic joint eliminates two degrees of freedom (DOF), allowing only linear motion along the slot without rotation or perpendicular movement.
- 🔄 The path of sliding in a prismatic joint can be either a straight line or a curved path, depending on the design.
- 🔵 The lecture introduces the concept of the prismatic joint between the blue slider and the green body containing the slot, clarifying that it is separate from other joints.
- 🤖 The prismatic joint can be defined between two rigid bodies or between a rigid body and the ground, with the latter often imagined with an additional barrier.
- 🔄 In a Crank-Slider mechanism, the prismatic joint between the blue slider and the ground takes away 2 DOF, contributing to the overall DOF calculation.
- 🧩 The general formula for calculating DOF in a system with revolute and prismatic joints is 3 times the number of bodies minus 2 times the sum of these joints (j1).
- 🔢 The sum of revolute and prismatic joints is denoted as j1, representing the total number of joints that allow for 1 DOF each.
- 🔄 In the provided examples, the DOF is calculated by applying the formula 3n - 2j1, where n is the number of bodies and j1 is the sum of revolute and prismatic joints.
- 🔚 The lecture concludes with an example involving multiple bodies and joints, reinforcing the concept that the DOF is 1 when calculated using the formula 3n - 2j1.
Q & A
What is a prismatic joint?
-A prismatic joint is a type of kinematic constraint that allows for linear motion between two rigid bodies along a specific path, which can be a straight line or a curve. One body has a slot and the other, referred to as the slider, moves along this slot.
How does a prismatic joint affect the degrees of freedom (DOF) in a system?
-A prismatic joint reduces the DOF in a system by constraining the motion of the connected bodies to a single direction along the slot, thus eliminating two degrees of freedom: one for the perpendicular motion and one for rotation around the slot axis.
What is the Crank-Slider mechanism mentioned in the script?
-The Crank-Slider mechanism is an example of a system with kinematic joints, where a slider is pinned to the ground and moves in conjunction with a crank, demonstrating the application of prismatic and revolute joints in a mechanical system.
How many degrees of freedom are initially present in a system with three rigid bodies?
-In a system with three rigid bodies, there are initially 9 degrees of freedom, as each body can move in three different directions (three translations and three rotations).
What is the role of revolute joints in the context of the DOF formula?
-Revolute joints play a significant role in the DOF formula as each revolute joint eliminates 2 degrees of freedom, contributing to the overall reduction of the system's DOF.
How is the number of joints which let 1 DOF represented in the extended formulation?
-In the extended formulation, the number of joints which let 1 DOF is represented by 'j1'. It includes both revolute and prismatic joints, and is used to calculate the total DOF in the system.
Can you explain the formula for calculating the DOF in a system with revolute and prismatic joints?
-The formula for calculating the DOF in a system with revolute and prismatic joints is: DOF = 3 * (number of bodies) - 2 * j1, where j1 is the sum of the number of revolute and prismatic joints.
What is the purpose of the barrier in the illustration of a slider on the ground?
-The barrier in the illustration of a slider on the ground serves to prevent the slider from leaving the ground, clarifying that the slider is constrained to move only along the defined path on the ground.
How many degrees of freedom does the system in the second example have, and why?
-The system in the second example has 1 degree of freedom. This is because there are 3 bodies contributing 9 initial DOFs, with 3 revolute joints reducing the DOF by 6, and 1 prismatic joint reducing it by an additional 2, leading to a total of 1 DOF remaining.
In the final example of the lecture, what is the total number of degrees of freedom, and how is it calculated?
-In the final example, the total number of degrees of freedom is 1. This is calculated by considering 5 bodies (giving 15 initial DOFs), 5 revolute joints (reducing DOF by 10), and 2 prismatic joints (reducing DOF by an additional 4), resulting in 15 - 14 = 1 DOF.
Outlines
🔧 Introduction to Prismatic Joints and Their Impact on DOF
This paragraph introduces the concept of prismatic joints, a type of kinematic constraint, with the aim of understanding how they affect the degrees of freedom (DOF) in mechanical systems. The paragraph begins by explaining the basic setup of a prismatic joint, where one rigid body has a slot and another rigid body slides along this slot. It clarifies that the slider can only move along the slot and cannot move perpendicular to it or rotate with respect to it. The paragraph also distinguishes between the prismatic joint and other types of joints present in the system. An example of a Crank-Slider mechanism is used to illustrate the calculation of DOF, which is done by subtracting the number of DOF eliminated by revolute and prismatic joints from the total DOF contributed by the number of bodies. The formula 3n - 2j1 is introduced, where n is the number of bodies and j1 is the sum of revolute and prismatic joints.
🔍 Detailed Examples of Calculating DOF with Prismatic and Revolute Joints
The second paragraph delves deeper into calculating the degrees of freedom in mechanical systems with prismatic and revolute joints. It provides two detailed examples to demonstrate the application of the formula 3n - 2j1. The first example involves a system with three bodies and four joints (three revolute and one prismatic), resulting in one degree of freedom. The second example is more complex, with five bodies, seven joints (five revolute and two prismatic), and also results in one degree of freedom. These examples serve to reinforce the understanding of how to calculate DOF in systems with various combinations of joints and to emphasize the role of prismatic joints in constraining movement to a single direction along a slot or bar.
Mindmap
Keywords
💡prismatic joint
💡kinematic constraint
💡degrees of freedom (DOF)
💡Crank-Slider mechanism
💡rigid body
💡slot
💡revolute joint
💡slider
💡ground
💡rigid bar
Highlights
Introduction to the 'prismatic' joint as a common kinematic constraint.
Examples include the Crank-Slider mechanism and a system with several kinematic joints.
The prismatic joint allows for sliding motion between two rigid bodies along a slot.
The blue slider in the example can only move along the slot, restricting two other DOF.
The path of sliding in a prismatic joint can be a straight line or a curve.
Clarification on the distinction between the prismatic joint and another joint in the system.
A prismatic joint can be defined between two rigid bodies or a rigid body and the ground.
Misunderstandings about the slider leaving the ground are addressed.
Another form of prismatic joint involves a slider moving along a rigid bar.
In the Crank-Slider mechanism, the DOF calculation is explained with 3 rigid bodies and 3 revolute joints.
The prismatic joint in the Crank-Slider mechanism takes away 2 DOF, resulting in a total DOF of 1.
Formulation extension to include the effect of prismatic joints on DOF calculation.
The concept of j1, representing joints that let 1 DOF, is introduced.
An example with a link pinned to the ground and another link passing through a slider is given.
The DOF calculation for the second example results in 1 DOF.
A complex example with multiple bodies and joints is presented.
The final DOF calculation for the complex example also results in 1 DOF.
Upcoming lecture topic on the rigid joint is teased.
Transcripts
Browse More Related Video
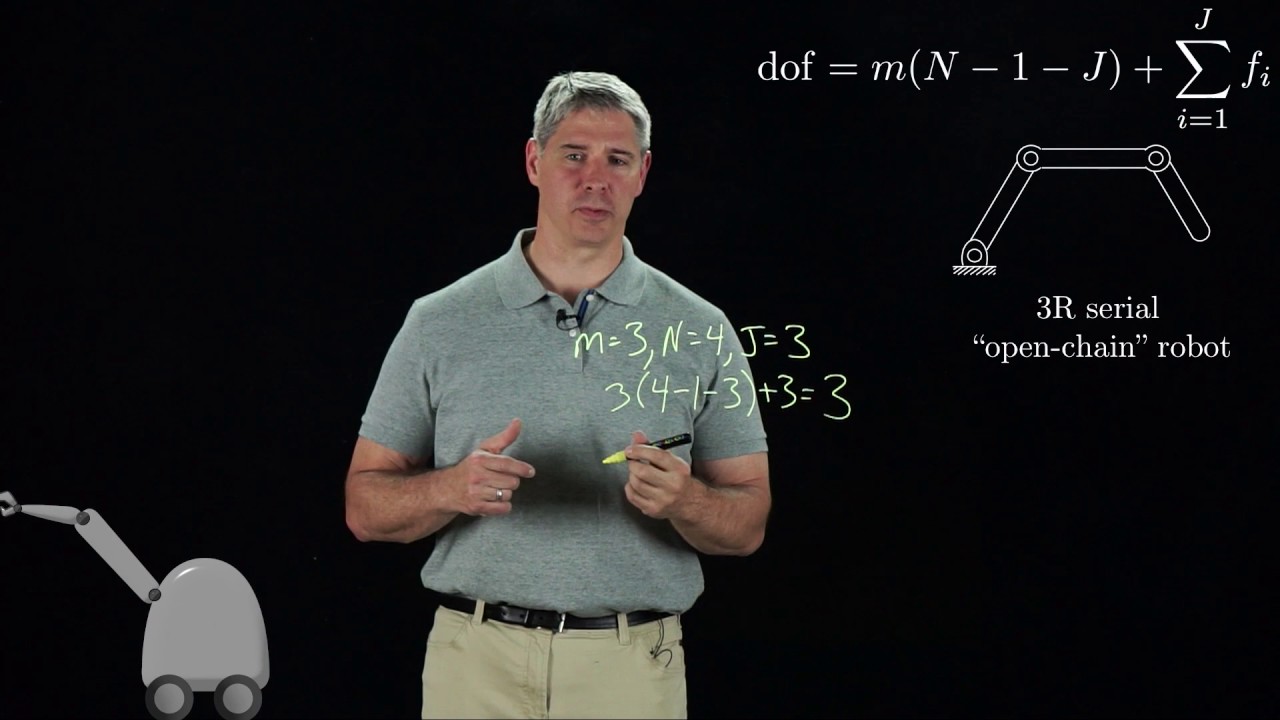
Modern Robotics, Chapter 2.2: Degrees of Freedom of a Robot
The Incredible Strength of Bolted Joints

Geology 15 (Faults, Folds, and Joints)
Lecture 16: 10 Numerical Problems on Degrees of Freedom/Mobility of Planar Mechanisms | Kutzback |

Why Railroads Don't Need Expansion Joints

Lec-21 I Eutectic systems I Applied chemistry I Chemical Engineering
5.0 / 5 (0 votes)
Thanks for rating: