AP Physics Workbook 6.E Equilibrium on an Incline
TLDRThis transcript discusses a physics problem involving a cart attached to a spring on an incline. The problem explores the equilibrium state, the free body diagram, and the forces at play, including gravity and the spring force. It derives an expression for the spring stretch in terms of physical constants and compares the period of oscillation on an incline to when the system is vertical. The explanation is complemented with a detailed analysis of the motion graph, illustrating the phase shifts between displacement, velocity, and acceleration. The core concept is that the period of simple harmonic motion is independent of amplitude and dependent on mass and spring constant.
Takeaways
- 📚 The scenario involves a cart of mass M attached to a vertical spring with spring constant K, which stretches a distance X_nought when the cart is in oscillating motion.
- 🧗 The cart is placed on a smooth incline at an angle θ above the horizontal and remains attached to the spring.
- 📈 A freebody diagram is drawn to show and label the forces exerted on the box, including gravity, normal force, and the spring force.
- 🌐 The force balance on the incline is derived, with the spring force (FS) being equal to the component of gravitational force (mg) times the sine of the incline angle (θ).
- 🔍 The expression for the stretch of the spring (L) on the incline is derived in terms of X_nought, θ, and physical constants, with L = X_nought * sin(θ).
- 🕒 The period of oscillation for simple harmonic motion is discussed, stating that it is independent of amplitude and depends only on the mass and spring constant, not on the incline angle.
- 📊 The script explains the relationship between displacement, velocity, and acceleration graphs, noting that velocity lags behind displacement by 90 degrees, and acceleration lags by 180 degrees.
- 🌟 The cosine wave nature of the velocity graph is highlighted, which is a horizontal shift of the sine wave representing displacement.
- 🔄 The phase shift concept is applied to the graphs, with the acceleration graph being a negative cosine wave and the velocity graph being a negative sine wave.
- 📐 The mathematical validation of the derived equations is emphasized, ensuring that they make sense for different values of θ, such as 0 and 90 degrees.
- 🎓 The overall understanding of simple harmonic motion, force balance, and the relationship between different types of motion graphs is reinforced.
Q & A
What is the scenario described in the transcript?
-The scenario involves a cart of mass M attached to a vertical spring with spring constant K. The cart oscillates on the vertical spring with a period T. It is then placed on a smooth incline at an angle theta above the horizontal and reattached to the spring.
What is the purpose of drawing a Freebody diagram for the cart at rest on the incline?
-The Freebody diagram is used to illustrate and label the forces acting on the cart when it is at rest on the incline. This helps in visualizing and understanding the forces such as gravity, the normal force, and the spring force that are in play during the problem-solving process.
What are the forces acting on the cart in the X and Y directions when it is on the incline?
-In the X direction, the force acting on the cart is the spring force (restorative force) which is to the right. In the Y direction, the forces are gravity (mg) acting down and the normal force acting perpendicular to the surface, which balances out to zero since the cart is at rest.
How is the stretch of the spring (X naught) related to the force of gravity and the angle of the incline (theta)?
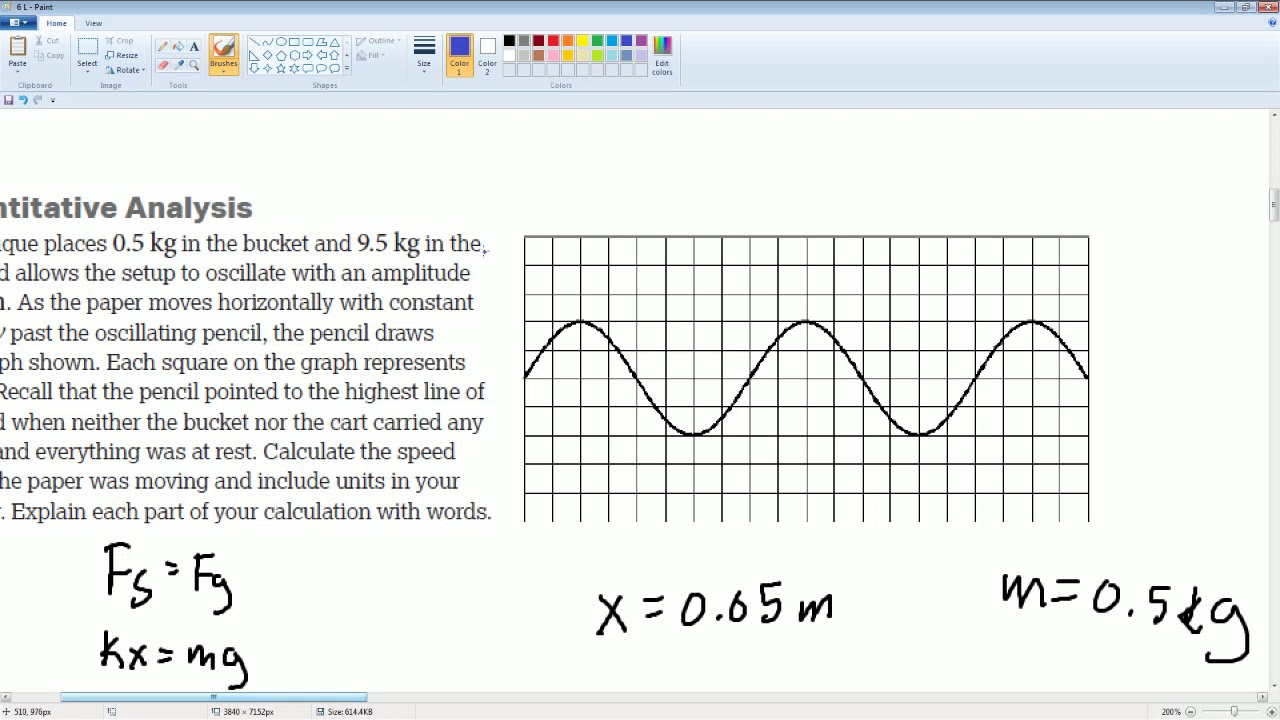
-The stretch of the spring (X naught) is related to the force of gravity (mg) and the angle of the incline (theta) through the equilibrium equation: FS - mg * sin(theta) = 0. Solving for FS gives us FS = mg * sin(theta), and since FS is the force exerted by the spring, we can use Hooke's law (K * L = force) to find L, the stretch of the spring in terms of X naught, theta, and the physical constants involved.
What happens to the period of oscillation when the cart is on the incline compared to when it is hanging vertically?
-The period of oscillation for simple harmonic motion is independent of the amplitude and depends only on the mass and the spring constant. Therefore, the period of oscillation (T) remains the same whether the cart is on the incline or hanging vertically, as the mass and spring constant have not changed.
How can the phase difference between position, velocity, and acceleration be remembered?
-The phase difference can be remembered by noting that the velocity is 90 degrees out of phase with the position, and the acceleration is 180 degrees out of phase with the position. This can be visualized by shifting the sine wave图形 of position to the left by 90 degrees to get the velocity wave, and then another 90 degrees (a total of 180 degrees) to get the acceleration wave.
What is the significance of the cosine wave in the context of the transcript?
-The cosine wave is significant as it represents the velocity of the oscillating cart. The derivative of the displacement (which is a sine wave) with respect to time gives the velocity, and since the sine function becomes a cosine function when differentiated, the velocity is represented by a cosine wave.
How does the force of the spring (FS) change when the cart is placed on the incline compared to when it is in the vertical position?
-When the cart is placed on the incline, the force of the spring (FS) is equal to the component of the force of gravity (mg) along the incline, which is mg * sin(theta). This is different from the vertical position where FS is equal to the full force of gravity (mg), assuming no other forces are acting in the X direction.
What is the relationship between the angle of the incline (theta) and the stretch of the spring (L)?
-The stretch of the spring (L) is related to the angle of the incline (theta) through the equation L = X_naught * sin(theta). This shows that the stretch of the spring is directly proportional to the sine of the incline angle, indicating that the stretch increases as the angle increases.
How does the concept of equilibrium help in solving the problem?
-The concept of equilibrium is crucial in solving the problem as it allows us to set up the forces acting on the cart to be balanced. By stating that the sum of forces in the X direction is zero (equilibrium condition), we can derive an equation to solve for the unknown stretch of the spring (L) in terms of X_naught, theta, and other physical constants.
What is the significance of the horizontal shift in the graphs of position, velocity, and acceleration?
-The horizontal shift is significant as it represents the phase difference between the graphs. For instance, the velocity graph is shifted 90 degrees to the right compared to the position graph, and the acceleration graph is shifted 180 degrees to the right (or 90 degrees left, considering the original position graph). This shift helps in understanding the relationship between different aspects of motion in simple harmonic oscillation.
Outlines
📚 Introduction to AP Physics - Simple Harmonic Motion
This paragraph introduces the topic of Simple Harmonic Motion from the AP Physics workbook, focusing on a specific scenario where a cart of mass M is attached to a vertical spring with spring constant K. The cart is set into oscillating motion, and the spring stretches a distance X naught. The scenario then evolves to place the cart on a smooth incline at an angle theta above the horizontal, still attached to the spring. The task is to draw a Freebody diagram and derive an expression for the stretch spring force L in terms of X naught, theta, and any physical constants. The paragraph emphasizes understanding the forces acting on the cart, such as gravity and the spring force, and how they change when the cart is on an incline. The key concept is that the force on the X direction (parallel to the incline) is a combination of the gravitational force component and the spring force, which must be solved for equilibrium.
📐 Analysis of Forces and Derivation of Spring Stretch on Incline
This paragraph delves into the analysis of forces acting on the cart when placed on an incline. It explains how to derive the expression for the stretch spring force (L) when the cart is on the incline, using the previously defined X naught, theta, and physical constants. The force of the spring (FS) is equated to the gravitational force component (mg sine theta) to find the equilibrium condition. By applying Hooke's law and substituting the known values, the stretch L is calculated as L = X naught * sine theta. The paragraph also discusses the implications when the incline angle theta is zero (horizontal surface) and when theta is 90 degrees (vertical surface), reinforcing the understanding of the force dynamics in different orientations.
📊 Derivatives and Phase Shifts in Simple Harmonic Motion
This paragraph discusses the mathematical concepts related to derivatives and phase shifts in the context of Simple Harmonic Motion. It explains how to derive the velocity and acceleration from the displacement function, which is modeled as a sine wave. The paragraph uses the chain rule to find the derivatives and describes how the graphs of these functions relate to each other through horizontal shifts. The key takeaway is that the velocity graph is a 90-degree phase shift from the displacement graph, and the acceleration graph is a 180-degree phase shift. This understanding is crucial for analyzing the motion characteristics of the cart on the spring in different scenarios.
🌐 Period of Oscillation and Its Independence from Incline Angle
This paragraph addresses the period of oscillation in Simple Harmonic Motion and how it is affected by the incline angle. It clarifies that the period of oscillation is independent of the amplitude and the incline angle, relying solely on the mass and the spring constant. The paragraph emphasizes that the new period of oscillation on the incline remains the same as the original period when the mass was hanging vertically. This understanding is essential for predicting the behavior of the system and ensuring accurate analysis of the cart's motion on the spring, regardless of the incline's orientation.
Mindmap
Keywords
💡Simple Harmonic Motion
💡Spring Constant (K)
💡Incline (theta)
💡Equilibrium
💡Hooke's Law
💡Period of Oscillation
💡Freebody Diagram
💡Component of Force
💡Amplitude
💡Derivative
💡Phase Shift
Highlights
The scenario involves a cart of mass M attached to a vertical spring with spring constant K, which stretches a distance X naught when the cart is set into oscillating motion on the vertical spring.
The period of oscillation (T) is given for the system when the cart is on the vertical spring.
The cart is then placed on a smooth incline at an angle theta above the horizontal and reattached to the spring.
A freebody diagram is drawn to show and label the forces exerted on the box at rest on the incline, including gravity, normal force, and spring force.
The force of gravity (mg) acts downward, the normal force is perpendicular to the surface, and the spring force is restorative to the right.
An expression for the stretch of the spring (L) when the cart is on the incline is derived in terms of X naught, theta, and physical constants.
The equilibrium condition on the incline is expressed as the net force in the X direction being zero, with the spring force (FS) balancing the component of gravitational force (mg sine theta).
The spring constant K is determined to be equal to M*G/X naught, based on the vertical oscillation.
The stretch of the spring on the incline (L) is found to be equal to X naught times sine theta, providing a relationship between the incline angle and the spring's stretch.
The period of oscillation for simple harmonic motion is independent of the amplitude and depends only on the spring constant (k) and the mass (M), not on the incline angle.
The motion of the cart on the incline is described as a cosine wave, contrasting with the sine wave motion when vertically oscillating.
The derivatives of displacement with respect to time yield velocity and acceleration, which are out of phase with displacement by 90 and 180 degrees, respectively.
The phase shifts of the sine and cosine waves are used to describe the relationship between position, velocity, and acceleration in simple harmonic motion.
The practical application of this analysis is in understanding the behavior of oscillatory systems under different orientations, such as an incline.
The theoretical contribution includes the application of Hooke's law and the analysis of forces in equilibrium to derive the spring stretch on an incline.
The mathematical analysis provides a comprehensive understanding of the dynamics of a mass-spring system in both vertical and inclined configurations.
The innovative method of this analysis is the step-by-step derivation of the spring stretch and the period of oscillation in non-standard configurations (incline).
The transcript serves as a valuable educational resource for students and professionals studying or working in the field of physics and mechanical engineering.
Transcripts
Browse More Related Video
AP Physics Workbook 6.L Sine function of SHM
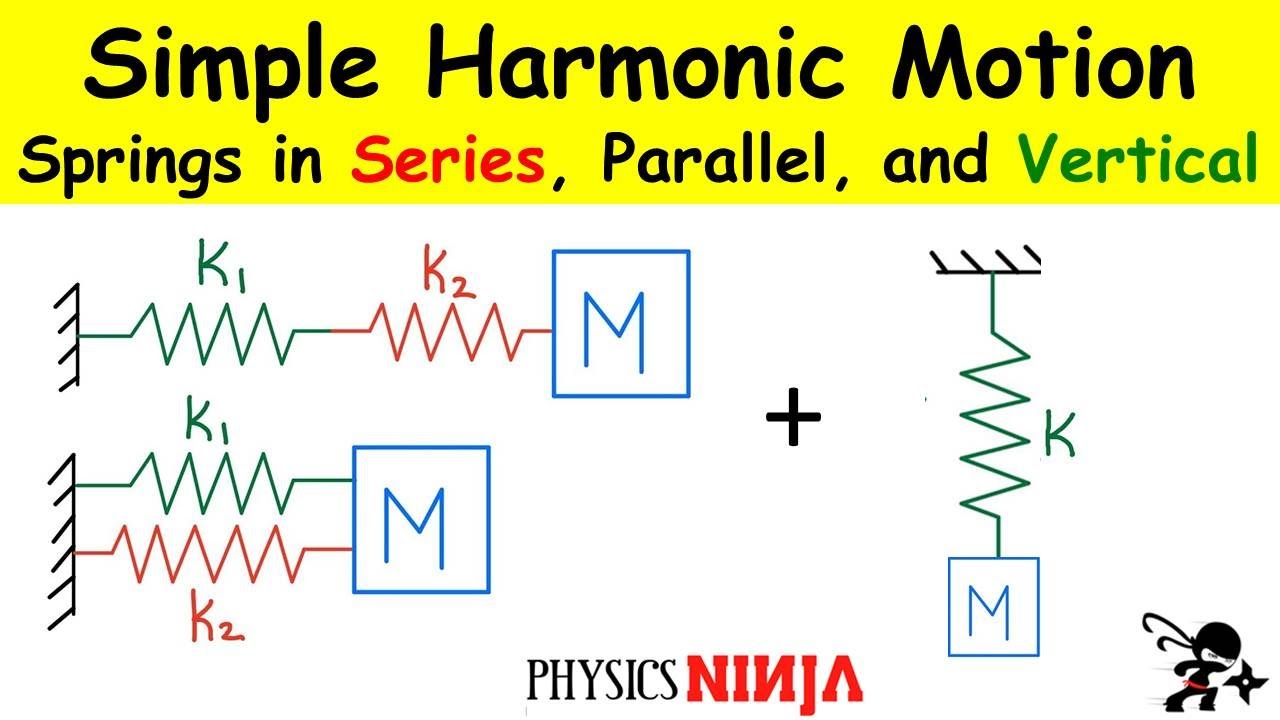
Simple Harmonic Motion - Springs in series vs parallel, and vertical springs

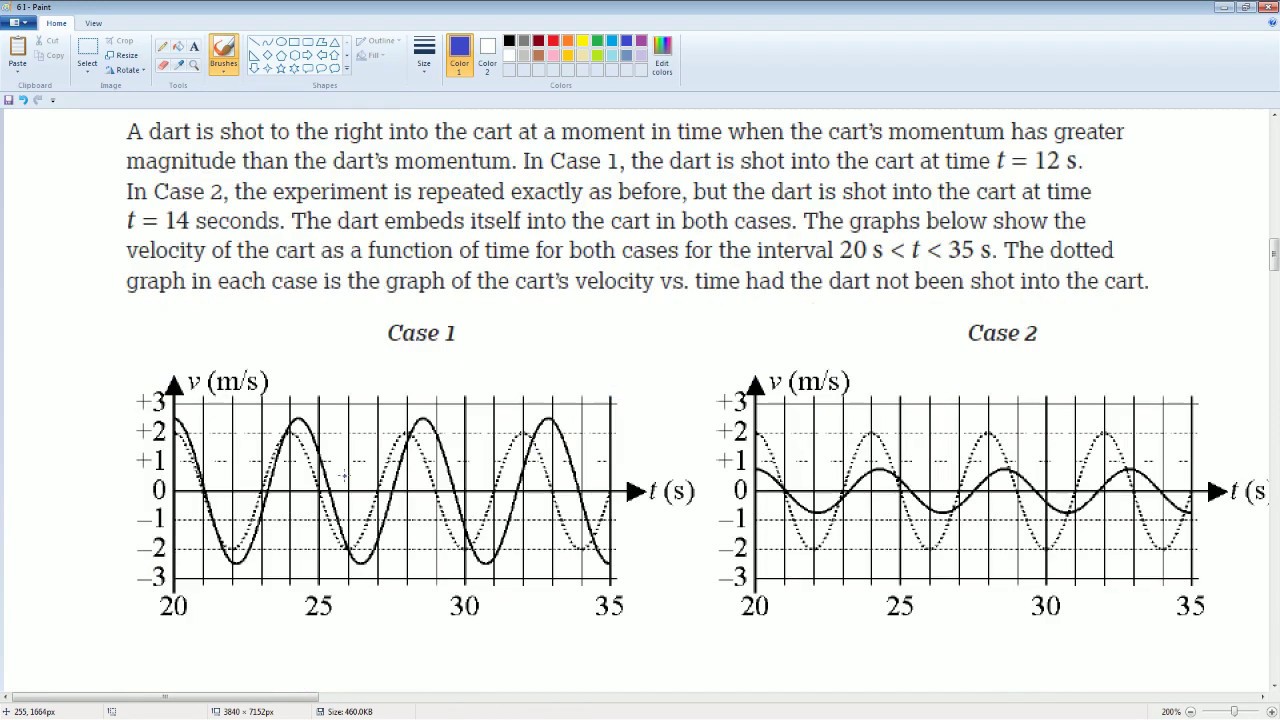
2023 AP Physics 1 Free Response #3
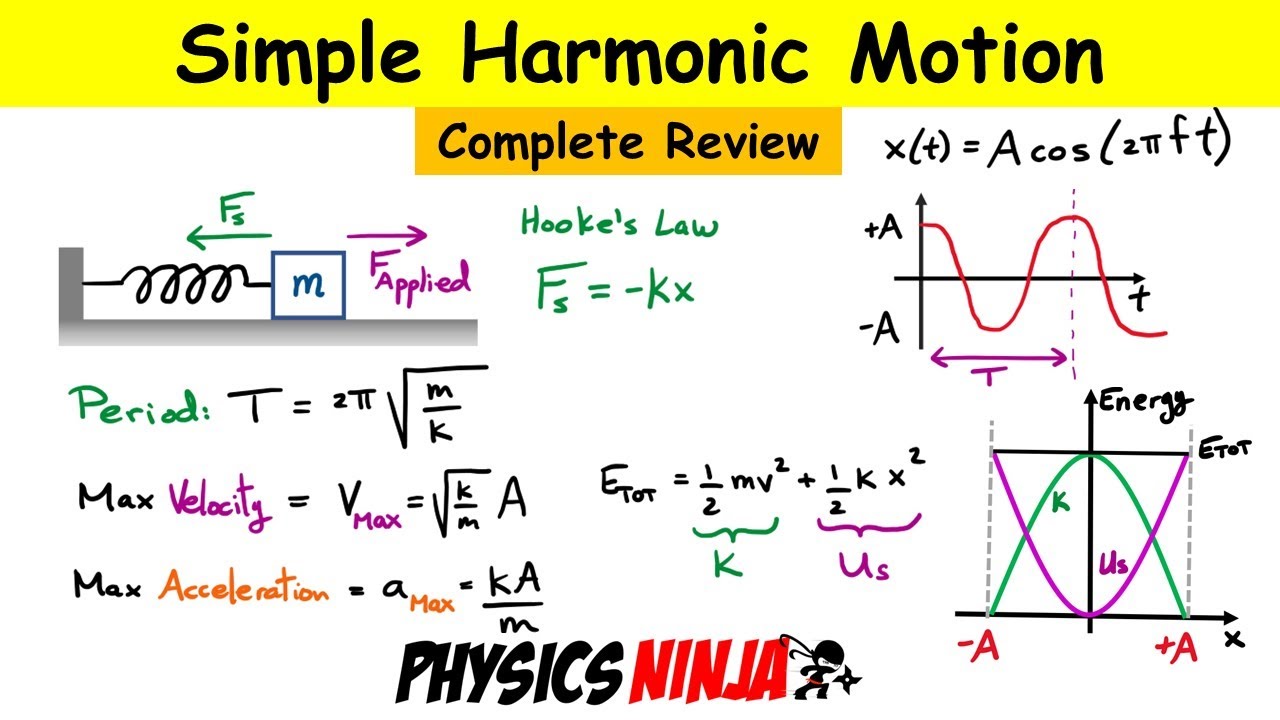
Simple Harmonic Motion - Complete Review of the Mass-Spring System

AP Physics 1 - Spring Combinations
AP Physics Workbook 6.I Changing Mass and Period of a Mass Spring SYstem
5.0 / 5 (0 votes)
Thanks for rating: