Basic Linear Algebra Concepts for Tensors
TLDRThis video delves into the realm of tensor calculus, starting with linear transformations and how they alter the appearance of vectors in different coordinate systems through transformation matrices. It then broadens the discussion to general transformations, which can be represented as functions, and introduces the concepts of bijective transformations and curvilinear coordinates, such as polar, cylindrical, and spherical. The video concludes with an overview of the chain rule for partial derivatives in Einstein notation, setting the stage for deeper exploration into tensor calculus in subsequent lessons.
Takeaways
- 📚 The video discusses the linear algebra of tensors, starting with linear transformations.
- 🔄 Linear transformations can change the appearance of a vector X in a new coordinate system C' through a transformation matrix L.
- 📏 Linear transformations are limited to operations like scaling and rotating axes, mapping lines to lines in different coordinate systems.
- 🌐 More general transformations are represented by functions, not constant matrices, and can involve complex changes beyond simple scaling or rotation.
- 🔑 The image vector X' after a general transformation is given by a function T, which can be expressed in terms of the components of X.
- 🔄 The concept of bijective transformations is introduced, which are one-to-one and allow for a unique correspondence between original and transformed coordinates.
- 📈 A bijection T results in a set of admissible coordinates for a vector X, forming a coordinate system.
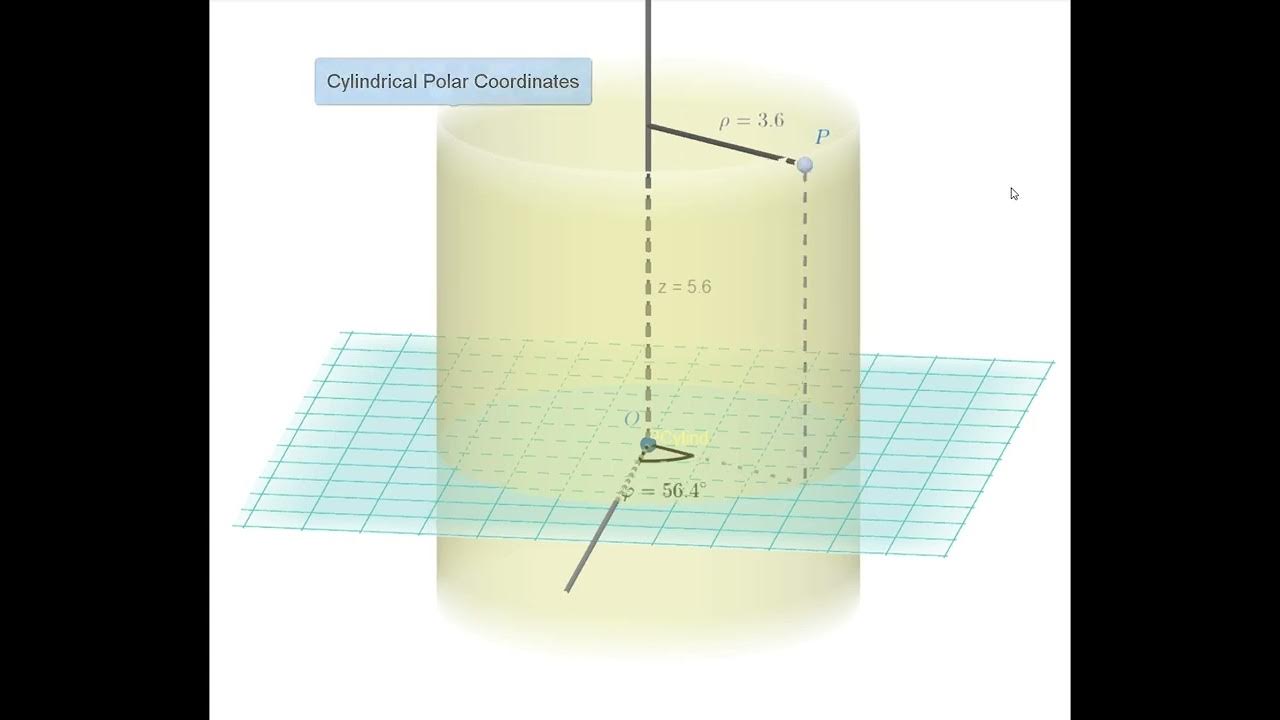
- 📊 If T is linear, the resulting coordinate system is called an affine coordinate system, while nonlinear T leads to curvilinear coordinates like polar, cylindrical, and spherical.
- 🔗 The chain rule for partial derivatives is presented in Einstein notation, showing how to compute derivatives of a function of multiple variables where each variable is a function of other variables.
- ⚙️ The chain rule is simplified using Einstein notation, summing over repeated indices to express the derivative of W with respect to Xj.
- 🎥 The video concludes with an announcement about upcoming content on tensor calculus, including coordinate transformations and the concepts of contravariant and covariant tensors.
Q & A
What is the main topic of this video?
-The main topic of this video is the linear algebra of tensors, with a focus on linear transformations and general transformations in coordinate systems.
What is a linear transformation in the context of coordinate systems?
-A linear transformation is a way of transforming one coordinate system into another, where the transformation is represented by a constant matrix. It includes operations like scaling and rotating axes.
What is the transformation matrix L in the context of linear transformations?
-The transformation matrix L is used to represent the linear transformation from one coordinate system to another. It is a matrix that, when multiplied by the original vector, gives the transformed vector in the new coordinate system.
How are general transformations different from linear transformations?
-General transformations are more flexible than linear transformations as they can be represented by functions rather than constant matrices. They can handle more complex changes than just scaling and rotating axes.
What is the expression for the vector X after a general transformation from coordinate system D to D prime?
-The expression for the vector X after a general transformation is given by X' = T(X), where T is the function defining the general transformation.
What is a bijective transformation?
-A bijective transformation is a one-to-one transformation where every original vector X has a unique corresponding vector X', and vice versa. It ensures that each point in the original space is mapped to exactly one point in the transformed space.
What are the two types of coordinate systems mentioned in the script?
-The two types of coordinate systems mentioned are affine coordinate systems, which are used for linear transformations, and curvilinear coordinate systems, which are used for non-linear transformations like polar, cylindrical, and spherical coordinates.
What is the chain rule for partial derivatives in the context of the script?
-The chain rule for partial derivatives is a mathematical formula used to compute the derivative of a function of multiple variables, where each variable is itself a function of other variables. It is presented in Einstein notation in the script.
How is the partial derivative of W with respect to XJ expressed using Einstein notation?
-Using Einstein notation, the partial derivative of W with respect to XJ is expressed as ∂W/∂XJ = ∑(∂F/∂UI * ∂UI/∂XJ), where the index I is summed over and is the repeated (dummy) index.
What is the purpose of Einstein notation in the script?
-Einstein notation is used in the script to simplify the expression of the chain rule for partial derivatives, making it more compact and easier to understand.
What is the next topic that will be covered in the series on tensor calculus?
-The next topic in the series on tensor calculus will be coordinate transformations and the concepts of contravariant and covariant tensors.
Outlines
📚 Introduction to Tensors and Linear Transformations
The video begins with an introduction to tensors and delves into the concept of linear transformations. It discusses how a vector 'X' in one coordinate system 'C' would appear when transformed into another coordinate system 'C prime' using a linear transformation. The transformation matrix 'L' is introduced as the key to this process, illustrating how it can be used to represent linear transformations. The video also touches on the limitations of linear transformations, which include scaling and rotating axes, and how they map lines from one coordinate system to another.
🔍 Exploring General Transformations and Coordinate Systems
This section of the video script explores more general transformations that cannot be represented by constant matrices. It introduces the concept of expressing these transformations as functions and how a vector 'X' in the 'D' coordinate system transforms into 'X prime' in the 'D prime' system. The script explains the notation for expressing this transformation in terms of the components of 'X prime' and discusses important definitions, such as bijective transformations, which are one-to-one and establish a unique correspondence between 'X' and 'X prime'. The video also introduces the concepts of admissible coordinates and coordinate systems, including affine and curvilinear coordinate systems, with examples like polar, cylindrical, and spherical coordinates.
📘 The Chain Rule for Partial Derivatives in Tensor Calculus
The final part of the script briefly introduces the chain rule for partial derivatives, a fundamental concept in tensor calculus. Without deriving it, the script presents the chain rule in Einstein notation, showing how to calculate the partial derivative of a function 'W' with respect to a variable 'X J' when 'W' is a function of 'n' variables 'u', and each 'u I' is a function of 'M' variables 'X'. The script simplifies the expression using the summation convention, where the repeated index 'I' is summed over, resulting in a compact formula for the partial derivative.
Mindmap
Keywords
💡Tensors
💡Linear Transformations
💡Coordinate System
💡Transformation Matrix
💡General Transformations
💡Bijective Transformation
💡Admissible Coordinates
💡Curvilinear Coordinates
💡Chain Rule
💡Einstein Notation
💡Partial Derivative
Highlights
Introduction to tensors in linear algebra and their role in coordinate transformations.
Explanation of linear transformations and how they affect vector representation in different coordinate systems.
The concept of a transformation matrix 'L' that maps vectors from one coordinate system to another.
Differentiation between linear transformations and more general transformations that require functions instead of constant matrices.
General transformations expressed as functions that can handle non-linear operations like scaling and rotating axes.
The equation for the transformed vector 'X prime' in terms of the original vector 'X' and the transformation function 'T'.
Bijective transformations defined as one-to-one mappings with unique correspondences between original and transformed coordinates.
The importance of bijective transformations in establishing admissible coordinates and coordinate systems.
Fein and curvilinear coordinate systems introduced as special cases of coordinate systems for linear and non-linear transformations, respectively.
Examples of curvilinear coordinates, including polar, cylindrical, and spherical coordinates.
Brief overview of the chain rule for partial derivatives without derivation, presented in Einstein notation.
Einstein notation used to simplify the expression for the partial derivative of a function of multiple variables.
The role of repeated indices in summation within the Einstein notation for partial derivatives.
Upcoming lecture series on tensor calculus, focusing on coordinate transformations and the concepts of contravariant and covariant tensors.
Acknowledgment of patrons supporting the educational content at a higher level.
Encouragement for viewers to like, subscribe, and support the channel for more content on tensor calculus.
Transcripts
Browse More Related Video

Video 12 - Jacobian Examples
Video 05 - Curvilinear Coordinates

Tensor Calculus 2: Cartesian/Polar Coordinates, and Basis Vectors

Video 11 - Vector Transformations

Linear combinations, span, and basis vectors | Chapter 2, Essence of linear algebra
Tensor Calculus For Physics Majors 004| Transformation of Two Index Tensors
5.0 / 5 (0 votes)
Thanks for rating: