Ch. 10.1 Systems of Linear Equations in Two Variables
TLDRThis video script introduces Chapter 10 on linear algebra, focusing on systems of linear equations with two variables. It explains the concept of systems modeling different aspects of a situation, represented by lines in R2. The script discusses three possible outcomes for two lines: intersection at one point, no intersection (parallel lines), and complete overlap (infinite solutions). It also outlines three methods for solving these systems: graphing, substitution, and elimination, demonstrating each with an example. The goal is to find the solution(s) to the system, which could be one unique solution, no solution, or infinite solutions, depending on the lines' relationship.
Takeaways
- 📚 The script introduces Chapter 10 as a continuation of the introduction to linear algebra, focusing on matrices and systems of equations with two variables.
- 🔍 Systems of linear equations involve multiple equations with multiple variables, ideally the same number of equations as variables, but this is not always the case.
- 📈 Each equation in a system represents a different characteristic of the situation being modeled, such as cost, production, or revenue in a production model.
- 📝 The script emphasizes that the variables in the equations represent the same thing, but the equations model different aspects of the overall system.
- 📉 The script discusses three possible scenarios for two lines (equations) in R2: intersecting at one point, being parallel and never intersecting, or being the same line with an infinite number of intersection points.
- 📊 There are three methods for solving systems of equations in R2: graphing, substitution, and elimination, each leading to the same solution if one exists.
- 📐 The graphing method involves plotting the lines and finding their intersection point, which represents the solution to the system.
- 🔑 The substitution method involves solving one equation for one variable and substituting it into the other equation to solve for the remaining variable.
- 🔍 The elimination method involves manipulating the equations to have the same coefficients for one of the variables and then adding or subtracting to eliminate that variable.
- 📈 An example is provided to demonstrate solving a system of equations using all three methods, resulting in the solution (8, -2).
- ⚠️ The script explains that if the elimination or substitution process results in a false statement (e.g., 0 = 2), it indicates there is no solution because the lines are parallel. If it results in an identity (e.g., 2 = 2), it indicates infinite solutions because the lines are the same.
Q & A
What is the main focus of Chapter 10 in the transcript?
-The main focus of Chapter 10 is on matrices, starting the discussion with systems of equations, specifically systems with two variables.
What is a system of linear equations and why are they used?
-A system of linear equations consists of more than one equation, each with more than one variable. They are used to model different characteristics or aspects of a situation, such as production costs, item quantities, and revenue in a business scenario.
What are the three possible outcomes when graphing two lines in R2?
-The three possible outcomes are: the lines intersect at one point (one solution), the lines are parallel and never intersect (no solution), or the lines coincide completely (infinite solutions).
What are the three methods mentioned for solving a system of equations in R2?
-The three methods are graphing the lines to find their intersection, the substitution method, and the elimination method.
How does the substitution method work for solving a system of equations?
-In the substitution method, you solve one of the equations for one variable and then plug that expression into the other equation to solve for the remaining variable.
Can you explain the elimination method briefly?
-The elimination method involves making the coefficients of one of the variables the same (or opposite) in both equations and then adding or subtracting the equations to eliminate that variable, after which you solve for the remaining variable.
What does it mean if you end up with an equation like 0 = 2 when solving a system of equations?
-If you end up with an equation like 0 = 2, it means there is no solution to the system of equations because it represents a false statement, indicating the lines are parallel and do not intersect.
What is the significance of the equation 2 = 2 when solving a system of equations?
-If you derive an equation like 2 = 2, which is always true, it signifies that the two lines are the same line, and there are infinite solutions to the system of equations.
How does the teacher in the transcript approach solving the example system of equations?
-The teacher first solves the example system by graphing, then uses the substitution method by setting the two expressions for 'y' equal to each other, and finally uses the elimination method by multiplying the equations to align the coefficients and then adding them to eliminate a variable.
What is the solution to the example system of equations provided in the transcript?
-The solution to the example system is the point (8, -2), which is found by graphing, substitution, and elimination methods.
Outlines
📚 Introduction to Linear Algebra and Systems of Equations
This paragraph introduces Chapter 10, which serves as an introduction to linear algebra, focusing on matrices and systems of equations. It explains that systems of equations can have the same number of equations and variables, but this isn't always the case. The section specifically discusses systems with two variables and two equations, each representing different characteristics of a situation being modeled. The paragraph also touches on the graphical representation of these systems as lines in R2 and the possible outcomes when two lines intersect: a single solution, no solution, or an infinite number of solutions, depending on whether the lines intersect, are parallel, or are the same line.
📈 Exploring Solutions to Systems of Equations in R2
The second paragraph delves into the three possible scenarios for two lines in R2: intersecting at one point, being parallel with no intersection, or coinciding completely. It outlines three methods for solving systems of equations: graphically by finding the intersection point, substitution by solving one equation for a variable and substituting into the other, and elimination by manipulating equations to cancel out one variable. The paragraph provides an example using the system 3/4x + 1/2y = 5 and -1/4x - 3/2y = 1, demonstrating the process of graphing to find the intersection point at (8, -2).
🔍 Solving Systems of Equations Using Substitution and Elimination
This paragraph continues the discussion on solving systems of equations, focusing on the substitution and elimination methods. It explains the process of substitution by setting the expressions for y from two equations equal to each other, leading to a single equation with one variable. The elimination method is described as manipulating the equations to have the same coefficients for either x or y and then adding or subtracting to eliminate one variable. The paragraph uses the same example system to demonstrate both methods, resulting in the same solution (8, -2) as found by graphing.
📘 Conclusion on Solving Systems and Understanding No Solution or Infinite Solutions
The final paragraph wraps up the discussion on solving systems of equations by emphasizing the elimination method as a preferred approach. It explains how arriving at a false statement like 0 = 2 indicates no solution, as the lines are parallel and never intersect. Conversely, if an identity like 2 = 2 is derived, it suggests the lines are the same, and there are infinite solutions. The paragraph reiterates that a specific value for x and y indicates a single solution to the system of equations.
Mindmap
Keywords
💡Linear Algebra
💡Matrices
💡Systems of Equations
💡Variables
💡Coefficients
💡Graphing
💡Substitution Method
💡Elimination Method
💡Slope
💡Intersection
💡Parallel Lines
💡Infinite Solutions
💡No Solutions
Highlights
Introduction to Chapter 10, focusing on linear algebra and matrices.
Starting with systems of equations, specifically two-variable systems.
The importance of having the same number of equations as variables for ideal modeling.
Different equations represent different characteristics of the same situation in a system of equations.
Each equation in a system can model different aspects of a production scenario, such as cost, production capacity, and revenue.
Each equation in the system represents a line, and solving the system involves finding the intersection of these lines.
Three possible outcomes when graphing two lines: intersection at one point, no intersection (parallel lines), or infinite intersection (same line).
Three methods for solving systems of equations in R2: graphing, substitution, and elimination.
Graphing method involves plotting lines and finding their intersection point.
Substitution method involves solving one equation for a variable and substituting into the other equation.
Elimination method involves manipulating equations to cancel out one variable by adding or subtracting them.
Example provided to illustrate solving a system of equations using all three methods.
Clearing fractions by multiplying equations to simplify the process of solving.
Solving for y in both equations to set them equal to each other in the substitution method.
Using the elimination method to match coefficients of x or y and then add or subtract the equations.
Identifying no solution scenario when equations result in a false statement like 0 equals a non-zero number.
Recognizing infinite solutions when equations simplify to an always-true statement like 2 equals 2.
The conclusion that all three methods should yield the same solution if it exists.
Transcripts
Browse More Related Video
Solving 3 Equations with 3 Unknowns
Ch. 10.2 Systems of Linear Equations in Several Variables

7.1.3 Solving a System of Equations Using Elimination

Matrices: Reduced row echelon form 3 | Vectors and spaces | Linear Algebra | Khan Academy
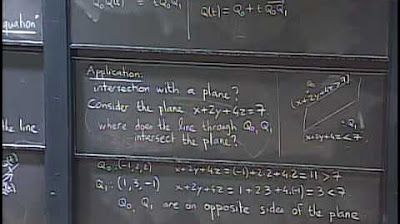
Lec 5: Parametric equations for lines and curves | MIT 18.02 Multivariable Calculus, Fall 2007
ILLUSTRATING THE SYSTEM OF NONLINEAR EQUATIONS || PRECALCULUS
5.0 / 5 (0 votes)
Thanks for rating: