Taylor polynomial remainder (part 2) | Series | AP Calculus BC | Khan Academy
TLDRThe video delves into the concept of an error function in approximation theory, emphasizing its distinction from the expected value. It explores the relationship between the error function and the derivatives of the function being approximated. The key focus is on bounding the error at a point 'b' by leveraging the properties of the nth derivative of the error function. The video outlines a method to calculate an upper bound for the error function over a closed interval, using integration and the maximum value of the function's derivative. This provides a powerful tool for assessing the accuracy of approximations.
Takeaways
- 📈 The concept of an error function is introduced, distinct from expected value, focusing on the difference between a function and its approximation.
- 🔢 The error function's absolute value is of interest, as it represents the distance between the function and the polynomial approximation at a given point x.
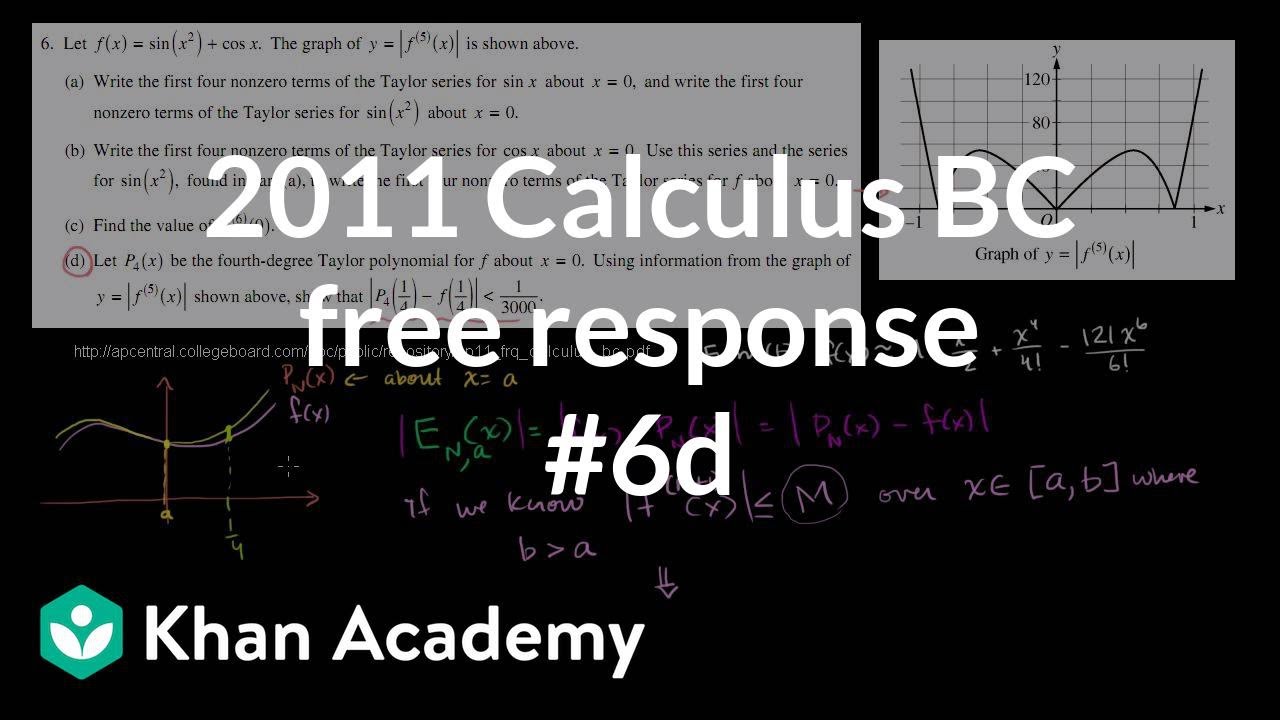
- 📌 The goal is to bound the error at some point b, greater than a, by finding a constant value that the error will not exceed.
- 📚 The (n+1)th derivative of the error function is shown to be equal to the (n+1)th derivative of the original function, which is crucial for bounding the error.
- 🌟 If the (n+1)th derivative of the original function is bounded over a specific interval, this can be used to bound the (n+1)th derivative of the error function.
- 🧮 Integration is suggested as a method to bound the error itself at a value b, starting from the bounded (n+1)th derivative.
- 📊 An example is provided where the (n+1)th derivative of f(x) is bounded by a constant m over the interval of interest.
- 🌐 The importance of the interval in which the derivative is bounded is emphasized, as it must include the point b for the bounding to be relevant.
- 🔄 Through a series of integrations, the goal is to work down from the (n+1)th derivative to the 0th derivative, which represents the error function itself.
- 🎯 A general formula for bounding the error function is derived, involving the constant m, the points a and b, the power of (n+1), and n+1 factorial.
- 💡 The ability to determine the maximum value of the function allows for the application of this bounding formula to real-world problems, providing a powerful mathematical tool.
Q & A
What is the error function discussed in the video?
-The error function discussed in the video is the difference between the actual function and its approximation, represented by the absolute value of the difference at a given point x.
Why is the error function important in approximations?
-The error function is important because it quantifies the accuracy of the approximation. By bounding the error, we can ensure that the approximation is within acceptable limits for practical applications.
How does the video attempt to bound the error function?
-The video attempts to bound the error function by integrating the absolute value of the nth derivative of the error function, which is assumed to be continuous and bounded over a given interval.
What is the significance of the nth derivative of the error function?
-The nth derivative of the error function is significant because it allows us to find an upper bound for the error function itself. By integrating the nth derivative, we can derive a formula to estimate the maximum possible error within a given interval.
How does the video relate the nth derivative of the function to the error function?
-The video establishes that the nth derivative of the error function is equal to the nth derivative of the actual function by absolute value. This relationship is crucial for bounding the error since it allows us to apply knowledge about the function's derivatives to the error function.
What is the role of the constant 'm' in bounding the error function?
-The constant 'm' represents the maximum value of the absolute value of the nth derivative of the function over the interval of interest. It is used to ensure that the bound on the error function is as tight as possible.
What is the significance of the interval [a, b] in the context of bounding the error?
-The interval [a, b] is the range over which the function is being approximated. The error is bounded over this interval, which includes the point 'b' where the error is to be evaluated.
How does the video handle the absolute value when integrating the nth derivative?
-The video notes that integrating the absolute value of a function can lead to a larger result than integrating the function itself, especially when the function changes sign over the interval. The absolute value of the integral is therefore used to ensure that the error bound accounts for both positive and negative deviations from the approximation.
What is the final formula derived for bounding the error function?
-The final formula derived for bounding the error function is the error function at 'b' is less than or equal to 'm times (b - a) raised to the power of (n + 1) divided by (n + 1) factorial'. This formula provides an upper bound on the error at any point 'b' within the interval [a, b].
How can the derived formula be applied in practical scenarios?
-The derived formula can be applied in practical scenarios where an approximation of a function is used, and it is necessary to ensure that the approximation is within acceptable limits. By knowing the maximum value of the nth derivative and the interval over which the approximation is valid, one can calculate the maximum possible error at any point within that interval.
What is the role of the constant 'c' in the bounding formula?
-The constant 'c' is introduced as part of the indefinite integral and represents an arbitrary constant. In the bounding formula, 'c' is chosen to be as small as possible to provide the tightest upper bound on the error function, which in this case is '-negative Ma', ensuring the bound is as low as possible.
Outlines
📈 Introduction to Error Function and Approximation
This paragraph introduces the concept of the error function, which measures the difference between a function and its approximation. It emphasizes that the error function is concerned with the absolute value of the difference, as the approximation may overshoot or undershoot the actual function at different points. The speaker aims to bound this error at a certain point 'b' by leveraging knowledge of the function's derivatives and using integration techniques.
🧮 Derivatives and Bounding the Error Function
The speaker discusses the relationship between the nth derivative of the error function and the function itself. By knowing the maximum value 'm' of the nth derivative over a given interval, the speaker outlines a method to bound the error function. This involves integrating the absolute value of the nth derivative and applying the fundamental theorem of calculus to find an upper bound for the error function in terms of the nth derivative and the interval [a, b].
📊 Minimizing the Upper Bound of the Error
In this section, the speaker refines the process of bounding the error function by minimizing the upper bound. The speaker explains that by choosing an appropriate constant 'c' based on the value of the nth derivative at 'a', the upper bound can be minimized. The process involves repeated integration and application of the properties of derivatives to eventually bound the error function in terms of 'm', 'x', 'a', and 'n'. The speaker also hints at the potential of applying this method to real-world examples.
Mindmap
Keywords
💡Error Function
💡Absolute Value
💡Derivative
💡Bounding
💡Integration
💡Interval
💡Constant Value
💡Polynomial Approximation
💡Max Value
💡nth Derivative
💡Anti-derivative
Highlights
Exploration of the error function begins, distinct from the expected value.
The error function represents the difference between the actual function and its approximation.
The absolute value of the error is of interest, not just the difference.
The goal is to bound the error at some point b, assuming b is greater than a.
The (n+1)th derivative of the error function is equal to the (n+1)th derivative of the function.
If the (n+1)th derivative of the function is bounded over an interval, it can help bound the error function.
The absolute value of the (n+1)th derivative is denoted as m for the interval between a and b.
The (n+1)th derivative of the error function's absolute value is also bounded by m.
Integration of both sides of the inequality may help bound the actual error function.
The integral of the absolute value is generally greater than the absolute value of the integral.
The nth derivative of the error function at a is equal to 0, which helps in bounding the error.
The error function's nth derivative is bounded by M times x minus a.
Further integration leads to bounding the error function by M times x minus a squared over 2.
The process can be continued until the bound on the error function of x is achieved.
The final bound on the error function is expressed as a formula involving m, x, a, n, and factorial.
Knowing the maximum value of the function allows bounding the error function over the interval between a and b.
The error function at b can be bounded by a specific formula involving m, b, a, and n plus 1 factorial.
Transcripts
Browse More Related Video
Taylor polynomial remainder (part 1) | Series | AP Calculus BC | Khan Academy
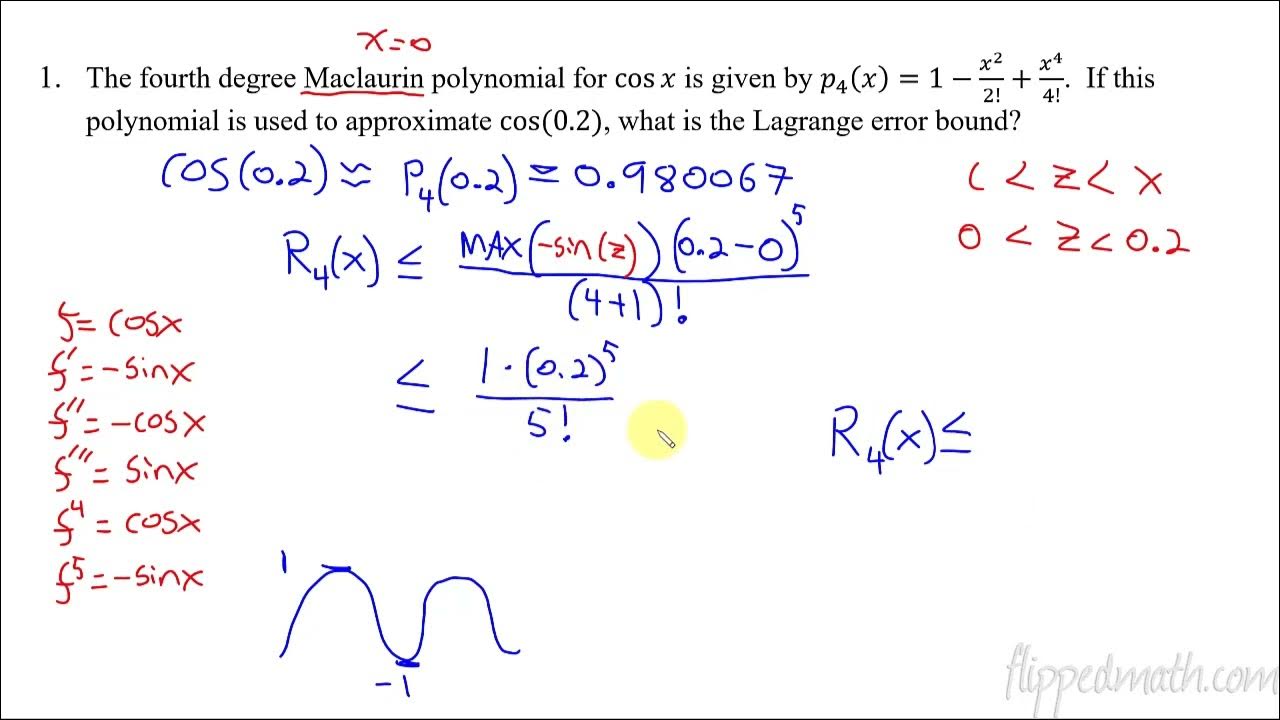
Avon High School - AP Calculus BC - Topic 10.12 - Example 1
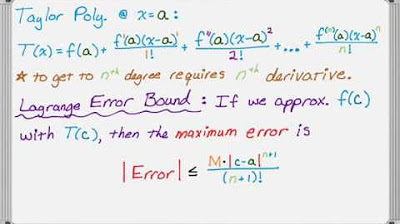
The Lagrange Error Bound for Taylor Polynomials
Calculus BC – 10.12 Lagrange Error Bound
2011 Calculus BC free response #6d | AP Calculus BC | Khan Academy

2023 AP Calculus BC FRQ #6
5.0 / 5 (0 votes)
Thanks for rating: