Tensor Calculus 17.5: Covariant Derivative (Component Definition) - Optional
TLDRThis video explores the concept of the covariant derivative, focusing on its component definition used in engineering-oriented classes. It clarifies the covariant derivative as both a vector field and a rank two tensor, explaining the geometric and component-based perspectives. The video also addresses the transformation of covariant derivatives between coordinate systems using Jacobian matrices and emphasizes that Christoffel symbols, despite their importance, are not tensors due to their unique transformation law.
Takeaways
- 📚 The video discusses an engineering-oriented approach to the covariant derivative, which is a concept used in differential geometry and general relativity.
- 🔍 Cartesian variables x and y are denoted as c1 and c2, while polar variables R and theta are denoted as p1 and p2, following the notation from a previous video.
- 📈 The covariant derivative in flat space is explained as the ordinary derivative, with the use of product rule for differentiating both vector components and basis vectors.
- 📘 Christoffel symbols are introduced as part of the notation for expressing the covariant derivative, which are defined in a specific mathematical way.
- 🌐 The covariant derivative of a vector field is described as another vector field that indicates the rate of change of the original field in a given direction.
- 🤔 A viewer's question about the covariant derivative being a rank two tensor is addressed, explaining the difference between the matrix (component) view and the vector field (geometric) view.
- 📝 The covariant derivative is expanded in Cartesian coordinates and the transformation to polar coordinates or other systems is discussed, emphasizing the geometric consistency across different coordinate systems.
- 📊 Engineers often use a specific notation for the components of the covariant derivative, focusing on the components rather than the full vector field.
- 🔄 The transformation between covariant derivative components in different coordinate systems involves both contravariant and covariant transformation rules, using Jacobian and inverse Jacobian matrices.
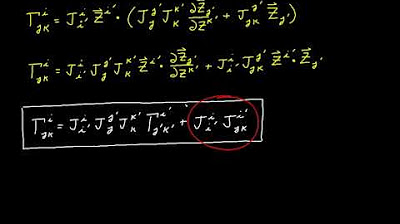
- 📐 Christoffel symbols are shown not to be tensors due to their unique transformation law, which includes an additional term not found in the tensor transformation law.
- 🚫 A derivation is provided to demonstrate that Christoffel symbols do not adhere to the tensor transformation law, hence they cannot be represented as a tensor product of basis vectors and co-vectors.
Q & A
What is the main topic discussed in the video?
-The main topic discussed in the video is the covariant derivative, specifically its component definition and its application in engineering-oriented classes.
What is the relationship between Cartesian variables and polar variables in the context of this video?
-In the video, Cartesian variables x and y are denoted as c1 and c2, while polar variables R and theta are denoted as p1 and p2, indicating their use in different coordinate systems.
What is the covariant derivative in flat space as introduced in the video?
-The covariant derivative in flat space is the ordinary derivative, used when differentiating a vector field with the product rule applied to both the vector components and the basis vectors.
What are Christoffel symbols and how are they used in the context of covariant derivatives?
-Christoffel symbols are used to express the covariant derivative of a vector field. They are defined in a way that incorporates the differentiation of both the vector components and the basis vectors.
How does the video explain the rate of change of a vector field along a radial line?
-The video explains that along a radial line, the rate of change of a vector field is represented by vectors pointing upward in the angular theta direction, indicating the increase in the component of the vectors in that direction.
Why might there be confusion about the covariant derivative being both a matrix and a vector field?
-The confusion arises because the covariant derivative can be viewed from different perspectives: as a matrix focusing on components, often preferred by engineering students, or as a vector field focusing on geometry, preferred by pure mathematics students.
What is the difference between the matrix point of view and the vector field point of view when considering the covariant derivative?
-The matrix point of view focuses on the components of the covariant derivative, treating it as a rank two tensor, while the vector field point of view emphasizes the geometrical aspect of the derivative, dealing with vectors in space.
How does the video explain the transformation of covariant derivative components between different coordinate systems?
-The video explains that to transform covariant derivative components between different coordinate systems, one must use a contravariant transformation rule with the Jacobian and a covariant transformation rule with the inverse Jacobian.
Why are Christoffel symbols not considered tensors according to the video?
-Christoffel symbols are not tensors because they do not transform with the expected tensor transformation law using Jacobians and inverse Jacobians; instead, they follow a more complex transformation law with an additional term.
What is the significance of the covariant derivative components forming a rank two tensor?
-The significance is that the covariant derivative components, which have both contravariant and covariant indices, transform according to tensor transformation rules, allowing for a consistent description of the derivative across different coordinate systems.
How does the video address the transformation of Christoffel symbols between coordinate systems?
-The video derives the transformation law for Christoffel symbols, showing that they transform with a complex law that includes an additional term beyond the standard tensor transformation, thus confirming they are not tensors.
Outlines
📚 Introduction to Covariant Derivative in Component Form
This paragraph introduces the concept of the covariant derivative from a component perspective, which is commonly used in engineering-oriented classes. It serves as a continuation of the flat space definition from a previous video. The Cartesian and polar variables are denoted as c1, c2 for Cartesian and p1, p2 for polar, respectively. The covariant derivative is explained in the context of vector fields and the use of Christoffel symbols is highlighted. An example is given to illustrate how the covariant derivative changes along a radial line in polar coordinates. The paragraph also addresses a viewer's question about the covariant derivative being a rank two tensor, explaining the difference between the matrix (component) view favored by engineers and the vector field (geometric) view preferred by mathematicians.
🔍 Deep Dive into Covariant Derivative Notation and Transformation
The second paragraph delves deeper into the notation used for the covariant derivative, particularly focusing on the engineering approach that treats it as a rank two tensor. It explains the use of semicolon notation to represent the components of the covariant derivative in different coordinate directions. The paragraph also reviews the concepts of covariant and contravariant indices, discussing how basis vectors and vector components transform under changes in the coordinate system. The transformation between covariant derivative components in Cartesian and polar coordinates is derived, showing that these components indeed form a rank two tensor, requiring both an inverse Jacobian and a Jacobian matrix for the transformation.
📐 Exploring the Geometry of Covariant Derivatives in 2D Space
This paragraph discusses the geometric implications of the covariant derivative in two-dimensional space. It explains how the covariant derivative of a vector field results in two vector fields corresponding to the main coordinate directions. The components of these vector fields are represented using the semicolon notation, and the transformation between these components using Jacobian and inverse Jacobian matrices is detailed. The paragraph emphasizes that the covariant derivative components form a tensor that follows both contravariant and covariant transformation rules.
🚫 Clarification on Christoffel Symbols Not Being Tensors
The final paragraph clarifies a common misconception by stating that Christoffel symbols are not tensors, despite their role in the transformation of vector field components. It presents a derivation of the transformation law for Christoffel symbols, showing that they do not follow the standard tensor transformation law due to an additional term in their transformation formula. The paragraph concludes by emphasizing that Christoffel symbols cannot be represented as a tensor independent of coordinates and cannot be written as a linear combination of tensor products of basis vectors and co-vectors.
Mindmap
Keywords
💡Covariant Derivative
💡Christoffel Symbols
💡Flat Space
💡Cartesian Coordinates
💡Polar Coordinates
💡Rank Two Tensor
💡Engineering vs. Pure Mathematics
💡Basis Vectors
💡Contravariant Components
💡Jacobian Matrix
💡Transformation Law
Highlights
Introduction to the covariant derivative in the context of engineering-oriented classes.
Explanation of Cartesian and polar variable notation as c1/c2 and p1/p2 respectively.
Review of the covariant derivative in flat space from a previous video.
Differentiation of vector components and basis vectors using the product rule.
Introduction of Christoffel symbols in the expression of covariant derivatives.
Illustration of the covariant derivative of a vector field along a radial line.
Clarification of the covariant derivative of a vector field being both a matrix and a vector field.
Different perspectives on the covariant derivative between engineering and pure mathematics.
Geometric interpretation of the covariant derivative in the direction of a curve parameterized by lambda.
Expansion of the vector field and lambda derivative using multivariable chain rule.
Expression of the covariant derivative in Cartesian coordinates using Christoffel symbols.
Potential for expansion of the covariant derivative in various coordinate systems.
Discussion on the covariant derivative as a rank two tensor in engineering terms.
Symbolic representation of covariant derivative components with superscript and subscript notation.
Explanation of covariant and contravariant indexes in the context of basis vectors and vector components.
Conversion between covariant derivative components in different coordinate systems using Jacobian matrices.
Christoffel symbols are not tensors due to their unique transformation law.
Derivation of the transformation law for Christoffel symbols, highlighting their non-tensorial nature.
Summary of the video's content on the covariant derivative's geometric interpretation and tensorial properties.
Transcripts



5.0 / 5 (0 votes)
Thanks for rating: