Ch. 11.5 Rotation of Axes
TLDRThis educational video script delves into the concept of rotating axes in conic sections, explaining how the presence of a bxy term indicates rotation. It covers the identification of conic types—circle, ellipse, hyperbola, and parabola—based on coefficients a and c. The script demonstrates the process of eliminating the xy term through a change of variables, introducing x' and y', to simplify the equation. It guides through an example, showing how to find the angle of rotation, transform the equation, and determine the conic's properties, including shifts and vertex location, ultimately revealing a parabola's equation in a new coordinate system.
Takeaways
- 📚 The lesson focuses on the rotation of axes in conic sections, following a discussion on shifting conics up, down, left, and right.
- 🔍 The presence of a mixed bx*y term in a conic section equation indicates that the conic has been rotated.
- 📉 Depending on the coefficients a and c, the conic can be identified as a circle, parabola, ellipse, or hyperbola.
- 🔄 The values of d, e, and f determine the shifts (left, right, up, and down) of the conic, while the mixed term indicates rotation.
- 🧩 Completing the square is a method used to address shifts but is not applicable for separating mixed x*y terms.
- 🔑 A change of variables, introducing x' and y' (rotated axes), is used to eliminate the mixed term and simplify the equation.
- 📐 The rotation of axes method involves aligning the new coordinate system with the features of the rotated conic section, such as vertices and axis of symmetry.
- 📈 The angle of rotation (2φ) is found using the formula tan^(-1)(b/(a-c)), and exact values for sine and cosine are derived using a right triangle and half-angle identities.
- ✂️ Substituting x and y in the original equation with expressions involving x', y', cosine, and sine completes the transformation to the new coordinate system.
- 📉 After rotation, the transformed equation may reveal the true nature of the conic section, such as a parabola, which was hidden by the rotation.
- 📊 The discriminant (Δ = b² - 4ac) applies to conic sections and determines the type: parabola (Δ=0), hyperbola (Δ>0), or ellipse (Δ<0).
Q & A
What is the main topic of the lecture?
-The main topic of the lecture is the rotation of axes in conic sections, specifically discussing how to handle conics that have been rotated in the coordinate plane.
What is the significance of the term 'bx.y' in the context of conic sections?
-The term 'bx.y' indicates that the conic section has been rotated. It's the presence of this mixed term that complicates the ability to separate the equation into all x terms and all y terms.
How does the value of 'a' and 'c' in the conic section formula affect the type of conic section?
-The values of 'a' and 'c' determine the type of conic section: if only 'x^2' is present, it's a parabola; if 'a' equals 'c', it's a circle; if both 'a' and 'c' are positive, it's an ellipse; and if one is negative, it's a hyperbola.
What is the purpose of completing the square in the context of conic sections?
-Completing the square helps to identify the shifts of the conic section left, right, up, or down. It simplifies the equation to a form where it's easier to analyze the conic's properties and transformations.
What is the method used to eliminate the 'bx.y' term when it's present in a conic section equation?
-The method used to eliminate the 'bx.y' term is a change of variables, often referred to as a rotation of axes or a substitution, which creates a new set of axes (x', y') that aligns with the rotated conic section.
What is the general equation form for a conic section?
-The general equation form for a conic section is ax^2 + bxy + cy^2 + dx + ey + f = 0.
How is the angle of rotation 'phi' determined in the context of rotated conic sections?
-The angle of rotation 'phi' is determined using the formula 2phi = tan^(-1)(b/(a-c)). This formula helps to find the exact angle by which the conic section has been rotated.
What is the significance of the discriminant 'delta' in the context of conic sections?
-The discriminant 'delta', defined as b^2 - 4ac, helps to determine the nature of the conic section: a parabola if delta is 0, a hyperbola if delta is positive, and an ellipse if delta is negative.
How does the rotation of axes simplify the analysis of a conic section?
-The rotation of axes simplifies the analysis by aligning the new coordinate system with the features of the conic section, such as vertices and axis of symmetry, making it easier to discuss shifts and other properties.
What is the process of converting the rotated conic section back to the standard coordinate system?
-The process involves using the inverse of the rotation matrix to convert the points from the rotated coordinate system (x', y') back to the standard coordinate system (x, y) using the sine and cosine values of the angle of rotation.
Outlines
📚 Introduction to Rotation of Axes in Conic Sections
The script begins with an introduction to Chapter 11.5, focusing on the rotation of axes for conic sections. The instructor explains that, in addition to shifting conics vertically and horizontally, they can also be rotated. The presence of a mixed xy term in the equation indicates a rotation. The nature of the conic (circle, parabola, ellipse, or hyperbola) is determined by the coefficients a and c of the x^2 and y^2 terms. The script also mentions that the values of d, e, and f determine the shifts, while the b term's presence signifies rotation. The instructor discusses the difficulty of separating x and y terms with mixed xy terms and introduces the concept of a change of variable to simplify the equation.
🔍 Exploring the Change of Variable and Axis Rotation
This paragraph delves into the method of changing variables to simplify equations with rotated conics. The instructor introduces x' and y' as new variables to represent the rotated axes, explaining that this substitution eliminates the mixed xy term, making it easier to analyze the conic's properties. The rotation matrix is mentioned, highlighting its importance in linear algebra and other fields. The paragraph also covers the process of converting between the original xy coordinate system and the rotated x'y' system using trigonometric functions, emphasizing the importance of exact values for the sine and cosine of the rotation angle.
📐 Calculating the Angle of Rotation for Conics
The instructor provides a detailed explanation of how to calculate the angle of rotation for a conic section given its equation. The general equation of a conic section is presented, and the formula for the angle of rotation, 2φ, is derived from the coefficients b, a, and c. The use of a right triangle and trigonometric identities to find the exact values of sine and cosine for the rotation angle is emphasized. The paragraph also discusses the process of substituting these values into the conic section's equation to simplify it, highlighting the importance of exact trigonometric values over decimal approximations.
📘 Detailed Example of Rotating a Conic Section
The script presents a step-by-step example of rotating a conic section. Starting with a given equation, the instructor demonstrates how to find the angle of rotation using the coefficients from the equation. A right triangle is constructed to find the exact sine and cosine values for the rotation angle. The substitution of x and y with expressions involving x', y', sine, and cosine is shown in detail, leading to a simplified equation without the mixed xy term. The process is meticulous, emphasizing the importance of each step in transforming the equation for analysis.
🔄 Simplify and Analyze the Transformed Equation
The instructor continues the example from the previous paragraph, focusing on simplifying the transformed equation. Clearing fractions and expanding terms are key steps in this process. The goal is to eliminate the mixed x'y' term, which complicates the analysis of the conic section. The paragraph explains how the substitution and simplification process leads to a clearer form of the equation, allowing for easier identification of the conic section's properties, such as its vertex and axis of symmetry.
📉 Transformation Reveals a Parabola
After the substitution and simplification, the instructor reveals that the transformed equation represents a parabola, not an ellipse as might have been initially suspected. The focus shifts to getting the equation into the standard form of a parabola, y^2 = 4px. The process involves isolating terms, completing the square, and identifying the shifts in the x and y directions. The vertex and focus of the parabola are calculated, providing a complete understanding of the conic's position and orientation in the rotated coordinate system.
📍 Graphing and Translating Back to the Original Coordinates
The instructor discusses graphing the parabola in the rotated coordinate system and then translating the vertex and focus back into the original xy coordinate system. The importance of using the rotation angle and its trigonometric functions for this translation is highlighted. The paragraph also describes the process of graphing the parabola, ensuring that the axes are aligned with the vertex and focus, and verifying the accuracy of the rotation and translation through the graph.
📈 The Discriminant and Conic Sections
The final paragraph of the script introduces the concept of the discriminant in the context of conic sections. The discriminant, defined as Δ = b^2 - 4ac, is used to determine the type of conic section represented by the equation. The instructor explains that a Δ of zero indicates a parabola, a positive Δ indicates a hyperbola, and a negative Δ indicates an ellipse. This concept is a standard tool in the analysis of quadratic equations and is applied here to the rotated conic sections.
Mindmap
Keywords
💡Rotation of Axes
💡Conic Sections
💡Completing the Square
💡Shifting
💡Mixed xy Term
💡Change of Variables
💡Vertex
💡Focus
💡Discriminant
💡Tangent Inverse
💡Half-Angle Identity
Highlights
Introduction to Chapter 11.5 focusing on rotation of axes in conic sections.
Explanation of how the presence of a bxy term indicates rotation of a conic section.
Discussion on determining the type of conic section based on coefficients a and c.
Clarification that the presence of a mixed xy term complicates the separation of x and y terms.
Introduction of a change of variables, using x' and y', to simplify equations with mixed terms.
Description of the rotation of axes method to eliminate the xy term for easier analysis.
Explanation of how the new axis system aligns with the features of the conic section.
Conversion from x, y to x', y' using rotation matrices in linear algebra.
Process of finding the angle of rotation using the formula 2φ = tan^(-1)(b/(a-c)).
Use of half-angle identities and right triangle for exact values of sine and cosine.
Substitution of x and y with expressions involving cosine and sine for rotation.
Example problem demonstrating the rotation of axes with the equation 9x^2 - 24xy + 16y^2 = 100x - y - 1.
Step-by-step solution for the example problem, including simplification and substitution.
Transformation of the given equation into a form that reveals it as a parabola after rotation.
Determination of the vertex and focus of the parabola in the rotated coordinate system.
Conversion of the vertex and focus coordinates back to the original xy coordinate system.
Graphical representation of the parabola in relation to the rotated and original coordinate systems.
Discussion on the discriminant (Δ = b^2 - 4ac) and its implications for conic sections.
Transcripts
Browse More Related Video
Ch. 11.4 Shifted Conics
INTRODUCTION TO PARABOLA | GRAPHING | VERTEX AT THE ORIGIN | PROF D
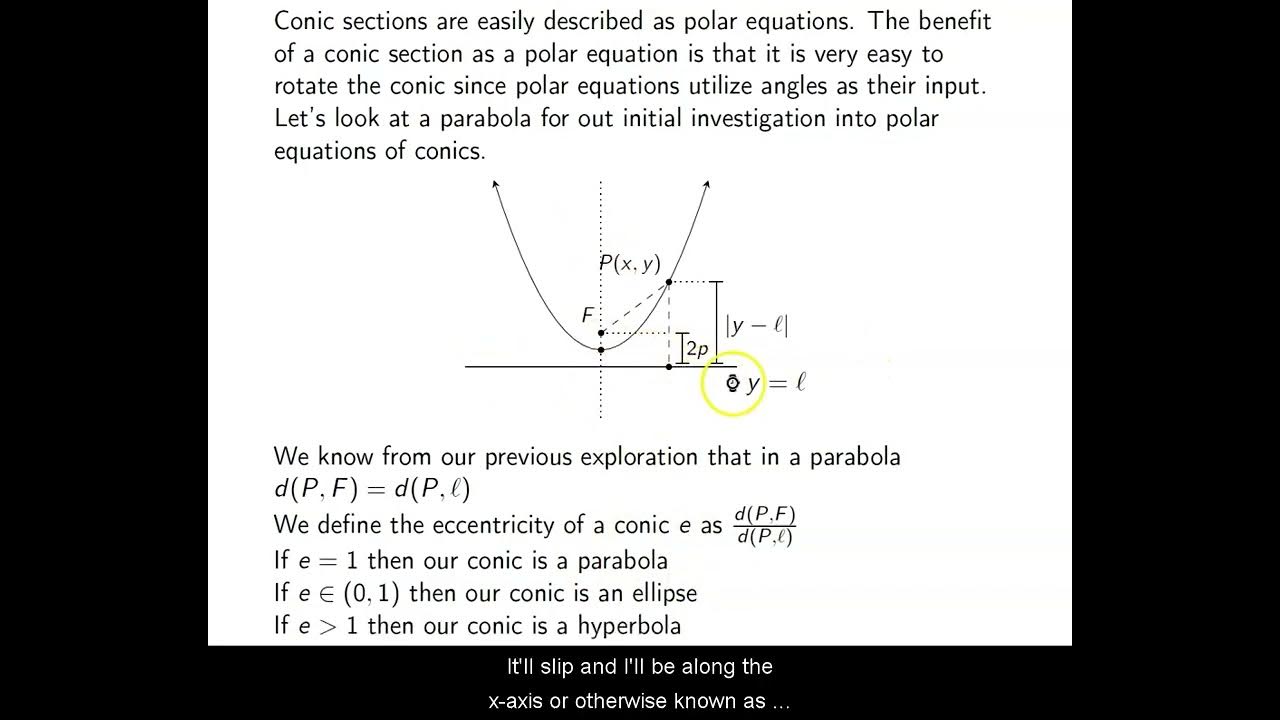
Ch. 11.6 Polar Equations of Conics
How to find the equation of a parabola given vertex and directrix | @ProfD
Graphing Quadratic Functions (Precalculus - College Algebra 24)
Writing Equation of A Parabola in Standard and General Form | @ProfD
5.0 / 5 (0 votes)
Thanks for rating: