Lec 4: Square systems; equations of planes | MIT 18.02 Multivariable Calculus, Fall 2007
TLDRThis educational video script delves into the equations of planes, their relation to linear systems and matrices, and geometric interpretations. It explains how planes can be defined by the equation ax + by + cz = d, using normal vectors and examples to illustrate. The script also explores solving linear systems by finding intersections of planes, which can result in unique solutions, no solution, or infinitely many solutions, depending on the planes' relationships. The importance of the determinant in matrix invertibility and its geometric implications are highlighted, providing insights into the conditions for solvable systems.
Takeaways
- 📚 The lecture discusses the equations of planes, their relationship with linear systems and matrices, and how they can be derived from geometric concepts.
- 🔍 An equation for a plane is typically given by ax + by + cz = d, where a, b, c, and d are constants, and this form determines the plane's position and orientation in space.
- 📏 The normal vector to a plane can be found from the coefficients of x, y, and z in the plane's equation, which is crucial for understanding the plane's orientation.
- 📈 The lecture provides examples of finding the equation of a plane given a point and a normal vector, illustrating the process of shifting a plane from the origin to a new point.
- 🤖 The script explains that planes can have infinitely many equations due to the possibility of scaling the coefficients while maintaining the same geometric plane.
- 📐 The cross product of two vectors contained in a plane can be used to find a normal vector to the plane, which is a key concept in 3D geometry.
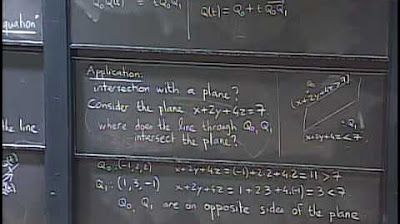
- 🧩 The solution to a system of linear equations corresponds to finding a point that lies on the intersection of multiple planes, which may be a line or a single point.
- 🔄 The determinant of a matrix is essential in determining whether a unique solution exists for a system of equations; a non-zero determinant indicates a unique solution, while a zero determinant suggests either no solution or infinitely many solutions.
- 📉 The geometric interpretation of the constant term 'd' in the plane equation is related to the plane's distance from the origin, scaled by the length of the normal vector.
- 🔄 The script distinguishes between homogeneous systems (where the right-hand side is zero) and non-homogeneous systems, highlighting that the former always has the trivial solution (0,0,0).
- 📊 The final part of the lecture hints at the upcoming topic of parametric equations for lines and curves, suggesting a continuation of the geometric and algebraic themes introduced.
Q & A
What is the general form of an equation for a plane?
-The general form of an equation for a plane is ax + by + cz = d, where a, b, c, and d are numbers. This equation represents the condition for a point at coordinates (x, y, z) to be in the plane.
How can you find the equation of a plane that passes through the origin with a given normal vector?
-To find the equation of a plane that passes through the origin with a normal vector N = <1, 5, 10>, you use the dot product condition OP · N = 0, where OP is the vector from the origin to a point P on the plane. This results in the equation x + 5y + 10z = 0.
What is the geometric significance of the normal vector in the plane equation?
-The normal vector in the plane equation represents the direction perpendicular to the plane. Its components correspond exactly to the coefficients of x, y, and z in the plane equation.
How does the constant term 'd' in the plane equation change if the plane is translated parallel to another plane?
-The constant term 'd' changes to reflect the distance between the two parallel planes. If the original plane has d = 0 and it is translated to a parallel plane, the new equation will have a different 'd' value that represents the shift from the origin.
What is the relationship between the coefficients of x, y, and z in the plane equation and the normal vector?
-The coefficients of x, y, and z in the plane equation (a, b, c) correspond exactly to the components of the normal vector to the plane. They indicate the direction perpendicular to the plane.
How can you find the equation of a plane that passes through a given point with a specific normal vector?
-To find the equation of a plane passing through a point P0 = (x0, y0, z0) with a normal vector N = <1, 5, 10>, you use the condition that the vector P0P is perpendicular to N, resulting in the equation (x - x0) + 5(y - y0) + 10(z - z0) = 0.
What is the geometric interpretation of the solution to a system of linear equations represented as planes?
-The solution to a system of linear equations, represented as planes, is the point where all the planes intersect. If there are three planes, they typically intersect at a single point, which is the solution to the system.
What are the possible outcomes when solving a system of three linear equations represented as planes?
-The possible outcomes when solving a system of three linear equations represented as planes are: a unique solution (if the planes intersect at a single point), no solution (if the planes are parallel and do not intersect), or infinitely many solutions (if the planes are parallel and all intersect along the same line).
How can you determine if a vector is parallel to a plane?
-A vector is parallel to a plane if it is perpendicular to the normal vector of the plane. You can determine this by calculating the dot product of the vector and the normal vector; if the result is zero, the vector is parallel to the plane.
What is the determinant of a matrix in the context of solving a system of linear equations?
-The determinant of a matrix, in the context of solving a system of linear equations, is a scalar value that can be used to determine the invertibility of the matrix. If the determinant is non-zero, the matrix is invertible, and the system has a unique solution. If the determinant is zero, the matrix is not invertible, and the system may have no solution or infinitely many solutions.
How does the geometric interpretation of the determinant of a matrix relate to the intersection of planes?
-Geometrically, the determinant of a matrix, which contains the coefficients of the normal vectors to the planes, indicates whether the planes intersect at a point, are parallel and have no intersection, or are such that a line determined by the first two planes is parallel to the third plane, potentially leading to no solution or infinitely many solutions.
What is the condition for a plane to pass through the origin in the context of its equation?
-A plane passes through the origin if the constant term 'd' in its equation (ax + by + cz = d) is zero. This means the plane intersects the origin (0, 0, 0).
How can you find the equation of a plane if you have two points on the plane?
-If you have two points on the plane, you can find two vectors contained in the plane by subtracting the coordinates of the points. Then, take the cross product of these two vectors to find a normal vector to the plane. The coefficients of the normal vector will give you the equation of the plane in the form ax + by + cz = d, where d can be found by substituting the coordinates of one of the points into the equation.
What is the significance of the constant term 'd' in the equation of a plane?
-The constant term 'd' in the equation of a plane (ax + by + cz = d) roughly measures how far the plane is from the origin, but it must be scaled by the length of the normal vector to represent the actual distance accurately.
Outlines
📚 Introduction to Plane Equations and MIT OpenCourseWare
The script begins with an introduction to the topic of plane equations and their relation to linear systems and matrices, as discussed in a previous lecture. It emphasizes the importance of MIT OpenCourseWare in providing free, high-quality educational resources and invites support for the initiative. The basic form of a plane equation, ax + by + cz = d, is introduced, explaining how it defines a plane in three-dimensional space.
🔍 Finding Plane Equations Using Normal Vectors
This paragraph delves into the method of finding the equation of a plane using a normal vector. It explains how to derive the equation of a plane that passes through the origin with a given normal vector and how to adjust the equation for a plane that passes through a specific point with the same normal vector. The concept of the dot product and its role in determining the perpendicularity of vectors to a plane are discussed, along with the significance of the normal vector's components in the plane's equation.
📐 Plane Equations and Parallel Vectors
The script continues with a discussion on the relationship between plane equations and parallel vectors. It explores how the coefficients of the plane equation correspond to the normal vector and how this relationship affects the plane's orientation. The process of finding a normal vector to a plane when given points on the plane through the cross product of vectors within the plane is also introduced, along with the geometric interpretation of these vectors.
🤔 Determining Vector Relations to a Plane
This section examines how to determine the relationship between a given vector and a plane. It discusses the conditions under which a vector is perpendicular or parallel to a plane and uses the dot product to test for perpendicularity. The script also addresses a student's question regarding the implications of plugging a vector into a plane equation and the meaning of the result.
🧠 Solving Linear Systems as Intersections of Planes
The paragraph explains the concept of solving linear systems by visualizing them as intersections of planes. It describes how each equation in a linear system represents a plane and solving the system involves finding a point where all planes intersect. The script uses a 3x3 linear system as an example to illustrate how the first two equations determine a line of intersection, and the third equation potentially provides a single solution point where this line intersects with another plane.
📉 Matrix Notation and Solutions to Linear Systems
This section introduces matrix notation in the context of solving linear systems. It explains the use of the formula X = A^(-1)B to find the solution to the system AX = B, where A^(-1) is the inverse of matrix A. The importance of the order of multiplication is highlighted, and potential issues with the method, such as the impossibility of inverting a matrix without a unique inverse, are discussed.
🏞 Geometric Interpretations of Linear Systems Outcomes
The script explores the different geometric outcomes of solving linear systems, such as no solution, infinitely many solutions, or a unique solution. It discusses the conditions under which these outcomes occur, such as the parallelism of planes or the containment of one plane within another. The concept of planes having infinitely many equations due to the scalability of their normal vectors is also touched upon.
🔄 The Role of Determinants in Matrix Inversion
This paragraph focuses on the role of determinants in determining whether a matrix can be inverted. It explains that a matrix is invertible if and only if its determinant is non-zero. The geometric significance of a zero determinant is discussed, relating it to the parallelism of planes and the absence of a unique solution to the system of equations.
🌐 Coplanarity of Normal Vectors and System Solutions
The script discusses the concept of coplanarity of normal vectors to planes and its implications for the solutions of a system of equations. It explains that if the normal vectors are coplanar, it indicates that the planes do not intersect at a single point but rather along a line or are parallel, leading to either no solution or infinitely many solutions to the system.
🛣️ Homogeneous Systems and Their Solutions
This final paragraph addresses homogeneous systems, where all constants on the right-hand side of the equations are zero. It explains that these systems always have the trivial solution (0,0,0) and that the determinant of the matrix A determines whether there are additional solutions. If the determinant is non-zero, there is only the trivial solution; if it is zero, there may be infinitely many solutions.
Mindmap
Keywords
💡Plane Equation
💡Normal Vector
💡Dot Product
💡Linear System
💡Matrix
💡Determinant
💡Cross Product
💡Parallel Vectors
💡Perpendicular
💡Homogeneous System
💡Parametric Equations
Highlights
Introduction to equations of planes and their relation to linear systems and matrices.
Equation of a plane is defined as ax + by + cz = d, where a, b, c, and d are numbers.
Finding the equation of a plane through the origin with a given normal vector.
Geometric interpretation of a plane's equation involving the normal vector's perpendicularity.
Deriving the equation of a plane not passing through the origin but through a given point.
Understanding the difference between planes perpendicular to a vector and those parallel to it.
The significance of the normal vector's coefficients in a plane's equation.
Demonstration of how to find a plane's equation using a point and a normal vector.
Explanation of how planes can have infinitely many equations due to scaling.
The method of finding a normal vector to a plane using the cross product of two vectors in the plane.
Clarification on the geometric interpretation of a vector being parallel or perpendicular to a plane.
The concept of solving a linear system as finding the intersection of multiple planes.
Different outcomes of solving linear systems: a unique solution, no solution, or infinitely many solutions.
Geometric significance of the constant term 'd' in a plane's equation relating to the plane's position from the origin.
Matrix notation and the use of A-inverse to solve linear systems AX = B.
Conditions under which a matrix is invertible and the implications for solving linear systems.
Homogeneous systems and their geometric interpretation involving planes passing through the origin.
The determinant's role in determining the existence and uniqueness of solutions to a linear system.
Parametric equations for lines and curves as a preview for the next lecture.
Transcripts
Browse More Related Video

Inverse matrices, column space and null space | Chapter 7, Essence of linear algebra

Matrices: Reduced row echelon form 3 | Vectors and spaces | Linear Algebra | Khan Academy
Normal Vectors and Equations of Planes (Calculus 3)

PreCalculus - Matrices & Matrix Applications (9 of 33) Gaussian Elimination: 3x3, Infinite Solutions
Ch. 10.2 Systems of Linear Equations in Several Variables
Lec 5: Parametric equations for lines and curves | MIT 18.02 Multivariable Calculus, Fall 2007
5.0 / 5 (0 votes)
Thanks for rating: