Lec 3: Matrices; inverse matrices | MIT 18.02 Multivariable Calculus, Fall 2007
TLDRThis script delves into the concept of the cross product in vector mathematics, explaining its geometric interpretation and manipulation rules. It highlights the right-hand rule for direction determination and the unique property that A cross B is not the same as B cross A. The script also introduces the use of cross products in finding the equation of a plane given three points in space. Moving on to matrices, the lecture covers the basics of matrix multiplication, the significance of the identity matrix, and the concept of matrix inversion. It provides a step-by-step guide on finding the inverse of a matrix using the adjoint method, emphasizing its importance in solving linear systems and coordinate transformations.
Takeaways
- 📚 The script discusses the concept of the cross product in vector mathematics, emphasizing its definition and geometric interpretation.
- 🔍 It explains the symbolic notation and formula for the cross product, highlighting the difference between A cross B and B cross A, which are opposites due to the right-hand rule.
- 📏 The script introduces the application of the cross product in finding the equation of a plane given three points in space, using both the determinant method and the normal vector approach.
- 🤔 It clarifies the concept of the zero vector resulting from the cross product of a vector with itself, illustrating the parallelogram with zero area.
- 🔄 The script transitions to discussing matrices, their role in linear relations, and how they can represent transformations such as coordinate changes.
- 🧠 It introduces the process of matrix multiplication, explaining how it is performed by taking dot products of rows and columns, and the conditions required for matrix multiplication to be valid.
- 🔢 The importance of the identity matrix is highlighted, showing how it acts as the 'do-nothing' transformation in matrix operations.
- 🔄 The script explains the concept of matrix inversion, its use in reversing transformations, and solving linear systems of equations.
- 📉 It demonstrates the process of finding the inverse of a matrix, including calculating minors, cofactors, transposing, and dividing by the determinant.
- 🤓 A special case of matrix multiplication is discussed, where the product of two matrices represents the composition of the corresponding transformations, emphasizing that matrix multiplication is not commutative.
- 📚 Finally, the script touches on the practicality of knowing how to invert matrices by hand for small matrices and the use of different algorithms for larger ones.
Q & A
What is the definition of the cross product in terms of determinant?
-The cross product of two vectors A and B in space is defined symbolically by the determinant det| i hat, j hat, k hat, a1, a2, a3, b1, b2, b3 |, where i hat, j hat, k hat are the unit vectors and a1, a2, a3 and b1, b2, b3 are the components of vectors A and B, respectively.
How is the actual formula for the cross product obtained?
-The actual formula for the cross product is obtained by expanding the symbolic determinant, resulting in the determinant of a2, a3, b2, b3 times i hat, minus the determinant of a1, a3, b1, b3 times j hat, plus the determinant of a1, a2, b1, b2 times k hat.
What is the geometric definition of the length of the cross product?
-The length of the cross product is equal to the area of the parallelogram with sides defined by vectors A and B.
How is the direction of the cross product determined?
-The direction of the cross product is determined by the right-hand rule, which states that if you extend your right hand in the direction of vector A and then curve your fingers in the direction of vector B, your thumb will point in the direction of the cross product.
Why are A cross B and B cross A considered different?
-A cross B and B cross A are different because the cross product is anti-commutative; swapping the vectors changes the sign of the result, making them opposites of each other.
What is the result of the cross product when the same vector is used for both operands?
-When the same vector is used for both operands, such as A cross A, the result is the zero vector because the parallelogram formed by the vector with itself is flat and has zero area.
How can the cross product be used to find the equation of a plane given three points in space?
-The cross product can be used to find a normal vector to the plane containing the three points by taking the cross product of vectors formed by the points. The equation of the plane can then be found using the condition that the determinant of the vectors, including the position vector of any point in the plane, equals zero.
What is the significance of the normal vector in the context of finding a plane's equation?
-A normal vector is a vector that is perpendicular to the plane. The equation of the plane can be found by using the dot product of the normal vector with the position vector of any point on the plane, setting the result to zero.
How is the relationship between matrices and linear transformations represented?
-The relationship between matrices and linear transformations is represented by matrix multiplication, where the matrix defines the transformation and the multiplication with a vector applies that transformation to the vector.
What is the condition required for two matrices to be multiplied?
-The condition required for two matrices to be multiplied is that the number of columns in the first matrix (A) must equal the number of rows in the second matrix (B).
What does the identity matrix represent in terms of transformations?
-The identity matrix represents the transformation that leaves the vector unchanged, effectively being the identity transformation in the context of matrix multiplication.
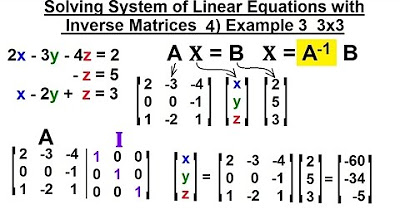
How can the inverse of a matrix be used to solve a linear system of equations?
-The inverse of a matrix can be used to solve a linear system of equations by multiplying the inverse of the matrix (A) on the left side of the equation by the matrix equation AX=B, resulting in X=A inverse B, where X is the solution vector.
What is the process of finding the inverse of a matrix?
-The process of finding the inverse of a matrix involves calculating the matrix of minors, converting it to the matrix of cofactors by flipping signs according to a checkerboard pattern, transposing the matrix to get the adjoint matrix, and finally dividing each element by the determinant of the original matrix A.
Outlines
📚 Introduction to Cross Product and Vectors
This paragraph introduces the concept of the cross product of vectors in a three-dimensional space, emphasizing its definition through a determinant involving unit vectors i, j, k, and the components of vectors A and B. It explains the geometric interpretation of the cross product, including its magnitude as the area of the parallelogram formed by vectors A and B and its direction perpendicular to the plane containing A and B, determined by the right-hand rule. The paragraph also highlights the anti-commutative property of the cross product, where A cross B is the negative of B cross A, and the zero vector result when the cross product is performed on a vector with itself.
📐 Application of Cross Product in Plane Equations
The second paragraph discusses an important application of the cross product: finding the equation of a plane given three points in space. It explains the method of using vectors derived from the points to form a determinant that equals zero for a point to lie in the plane. The paragraph also introduces the concept of a normal vector to the plane, which is perpendicular to the plane and can be found using the cross product of two vectors lying in the plane. The relationship between the determinant method and the normal vector method for finding the plane's equation is established, showing they yield the same result.
🧩 Exploring Matrices and Linear Transformations
This paragraph delves into the basics of matrices, their use in expressing linear relations between variables, and their role in coordinate system transformations. It provides an example of how to represent a change of coordinates using matrix multiplication and explains the concept of matrix products in terms of dot products between rows and columns. The paragraph also covers the conditions required for matrix multiplication to be possible, emphasizing the need for the number of columns in the first matrix to match the number of rows in the second.
🔍 Matrix Multiplication and Its Properties
The fourth paragraph continues the discussion on matrices, focusing on the process of matrix multiplication and its properties. It clarifies that the product of two matrices represents the composition of transformations, with the order of multiplication being from right to left. The paragraph also introduces the concept of the identity matrix, which acts as the neutral element in matrix multiplication, and provides an example of a matrix that represents a 90° rotation in the plane, illustrating how matrix multiplication can be used to find the result of multiple transformations.
🔄 Inverse Matrices and Solving Linear Systems
The fifth paragraph introduces the concept of inverse matrices, which are essential for reversing transformations and solving linear systems. It explains that the inverse of a matrix A is another matrix that, when multiplied by A, yields the identity matrix, effectively undoing the transformation A. The paragraph outlines the method for finding the inverse of a matrix, which involves computing the adjoint matrix and dividing by the determinant of A. The process is illustrated through the steps of finding minors, cofactors, transposing, and finally dividing by the determinant.
📘 Comprehensive Summary of Matrix Inversion
The final paragraph provides a detailed explanation of the matrix inversion process, which is crucial for solving linear systems and understanding transformations. It walks through the computation of the adjoint matrix by calculating minors, adjusting signs according to a checkerboard pattern to find cofactors, and transposing the matrix. The paragraph concludes by emphasizing the importance of dividing the adjoint matrix by the determinant of the original matrix to obtain the inverse. This process is essential for reverting transformations and solving for unknowns in linear equations represented by matrices.
Mindmap
Keywords
💡Cross Product
💡Determinant
💡Right-Hand Rule
💡Parallelepiped
💡Normal Vector
💡Matrix
💡Matrix Multiplication
💡Identity Matrix
💡Rotation Matrix
💡Inverse Matrix
💡Adjoint Matrix
Highlights
Introduction to the cross product of vectors in space and its symbolic notation using determinants.
Explanation of the actual formula for the cross product obtained by expanding the determinant.
Geometric definition of the cross product, including its length and direction.
The right-hand rule for determining the direction of the cross product.
Unique properties of the cross product, such as non-commutativity and the result of A cross A being the zero vector.
Application of the cross product in finding the equation of a plane given three points in space.
The use of determinants to determine if points are coplanar by checking if the formed parallelepiped is flattened.
Finding the normal vector to a plane using the cross product of vectors within the plane.
The relationship between the dot product, normal vectors, and the condition for a point to be in a plane.
The concept of matrix multiplication and its use in expressing linear relations between variables.
The importance of matching the width of one matrix with the height of another for multiplication to be possible.
The role of the identity matrix in transformations and its property of leaving vectors unchanged.
Introduction to the matrix for rotating a vector by 90° and its effect on the basis vectors.
The process of matrix multiplication representing sequential transformations and its associativity.
The method for finding the inverse of a matrix, including the computation of minors and cofactors.
The significance of the adjoint matrix in finding the inverse and the final step of dividing by the determinant.
Practical application of matrix inverses in solving linear systems and reverting variable transformations.
The distinction between multiplying matrices and vectors on the left versus the right and its implications.
Transcripts
Browse More Related Video

Ch. 10.5 Inverses of Matrices and Matrix Equations
PreCalculus - Matrices & Matrix Applications (28 of 33) Solving Sys of Linear Eqn with Inverse

Ch. 9.5 The Cross Product

PreCalculus - Matrices & Matrix Applications (19 of 33) What is an Identity Matrix?

Matrices to solve a system of equations | Matrices | Precalculus | Khan Academy
Cross Product (Introduction)
5.0 / 5 (0 votes)
Thanks for rating: