Determining a position vector-valued function for a parametrization of two parameters | Khan Academy
TLDRThe video script delves into the mathematical concept of parameterizing a torus, or doughnut shape, using two parameters s and t. The challenge lies in visualizing the transformation of these parameters into a 3D space. The script explains how s represents the rotation around a circle in the z-y plane and t signifies the rotation of the entire circle around the z-axis. The position vector-valued function is then defined, with z as a function of s, and x and y as functions of both s and t, ultimately mapping any (s, t) to a point in x-y-z space. The process highlights the importance of visualization and understanding parameterization for further studies in surface integrals.
Takeaways
- 📐 The concept of parameterizing a torus, or doughnut shape, is introduced as a means of visualizing and defining its surface mathematically.
- 🔄 Two parameters, s and t, are used for the parameterization, where s represents the angle around a circle in the z-y plane and t represents the rotation of this circle around the z-axis.
- 🌀 The parameter s varies between 0 and 2π, corresponding to a full rotation around the circle, while t also varies between 0 and 2π, representing a full rotation around the z-axis.
- 📍 The position vector-valued function r(s, t) is defined to map any (s, t) to a point on the torus in 3D space, with components (x, y, z).
- 🚶♂️ The z-component of the torus is determined solely by s and is given by a * sin(s), representing the distance above the x-y plane.
- 🛤️ The x and y components of the torus depend on both s and t, and are given by (b + a * cos(s)) * sin(t) for x and (b + a * cos(s)) * cos(t) for y, representing the position on the x-y plane after rotation.
- 🔺 The parameterization is visualized in the s-t domain as a square with sides parallel to the x, y, and z axes, where each point in the domain corresponds to a point on the torus in 3D space.
- 📈 The position vector-valued function is expressed as a linear combination of the unit vectors i, j, and k, with coefficients determined by the parameters s and t.
- 🌐 The parameterization allows for the calculation of surface integrals, which is crucial for understanding various properties of the torus, such as its surface area.
- 🤔 The challenge of this process lies in visualizing the 3D structure of the torus based on the 2D parameter domain, emphasizing the importance of spatial reasoning in mathematics.
- 🔄 The parameterization is periodic in both s and t, with the understanding that the function repeats its values at s = 2π and t = 2π, allowing for a seamless representation of the torus surface.
Q & A
What is the primary focus of the video?
-The primary focus of the video is to explain how to parameterize a torus, or a doughnut shape, using two parameters, s and t, and to visualize this process.
What does the parameter s represent in the torus parameterization?
-The parameter s represents the angle between the radius of the circle that forms the cross-section of the torus and the x-y plane. It ranges from 0 to 2 pi.
How is the z-coordinate of a point on the torus determined?
-The z-coordinate of a point on the torus is determined by the distance above the x-y plane, which is given by the function z(s) = a * sin(s), where a is the radius of the circle and s is the parameter.
What is the role of the parameter t in the torus parameterization?
-The parameter t represents the angle by which the entire circle has rotated around the z-axis. It helps define the position of the circle on the torus surface.
How are the x and y coordinates of a point on the torus determined?
-The x and y coordinates of a point on the torus are determined by the function of s and t, where x(s, t) = (b + a * cos(s)) * sin(t) and y(s, t) = (b + a * cos(s)) * cos(t), with b being the distance from the origin to the center of the circle.
What is the significance of the sine and cosine functions in the parameterization of the torus?
-The sine and cosine functions are used to determine the height (z-coordinate) and the position along the x and y axes relative to the center of the circle on the torus surface. They are essential for creating the 3D shape of the torus.
How does the position vector-valued function represent a point on the torus?
-The position vector-valued function, r(s, t), is defined as r(s, t) = (b + a * cos(s)) * sin(t) * i + (b + a * cos(s)) * cos(t) * j + a * sin(s) * k. It gives the exact position vector for any point on the torus when provided with values for s and t.
What is the domain of the parameters s and t in the torus parameterization?
-The domain of the parameters s and t is from 0 to 2 pi. This range allows for the complete coverage of the torus surface.
Why is visualization important in the context of parameterizing a torus?
-Visualization is crucial because it helps in understanding the transformation of the parameters s and t into the 3D space of the torus. It aids in comprehending the mathematical relationships and the geometry of the torus shape.
How does the parameterization of a torus relate to surface integrals?
-The parameterization of a torus is important for surface integrals because it provides a mathematical description of the torus surface, which is necessary for calculating properties such as surface area or evaluating integrals over the torus.
What is the main challenge in understanding the parameterization of a torus?
-The main challenge is visualizing the 3D shape and understanding how the parameters s and t map to points on the torus surface. It requires a good grasp of trigonometry and the ability to visualize the mathematical relationships in three-dimensional space.
Outlines
📐 Visualizing the Parameterization of a Torus
The paragraph introduces the concept of parameterizing a torus, or a doughnut shape, by using two parameters s and t. The main challenge is visualizing this mathematical concept, which involves rotating a point around a circle in the z-y plane, parameterized by s, and then rotating this circle around the z-axis, parameterized by t. The domain for s is from 0 to 2 pi, and for t, it's also between 0 and 2 pi. The goal is to define a position vector-valued function that represents this parameterization, starting with the z-component, which depends only on s and is given by a times the sine of s. The paragraph emphasizes the importance of visualization in understanding this mathematical process.
📐 Determining the X and Y Coordinates of the Torus
This paragraph delves into the specifics of determining the x and y coordinates of the torus. It explains that when s is 0, the torus lies in the x-y plane with z being zero, and when s is pi over 2, it's at the top of the doughnut shape, a distance a above the x-y plane. The x and y coordinates are influenced by the rotation around the z-axis and the circle itself. The x-coordinate is given by b plus a cosine of s times the sine of t, and the y-coordinate is given by b plus a cosine of s times the cosine of t. The paragraph uses trigonometry and right triangles to explain these relationships and how they translate into the 3D space of the torus.
📐 The Position Vector-Valued Function for the Torus
The paragraph describes the construction of the position vector-valued function for the torus, which is a function of parameters s and t. It explains how to represent the x, y, and z components of the vector as b plus a cosine of s times the sine of t for the x-component, b plus a cosine of s times the cosine of t for the y-component, and a times the sine of s for the z-component. These components are then combined to form the full position vector, which can be used to find the exact position on the torus for any given s and t within the specified domain. The paragraph emphasizes the importance of understanding the parameterization process, especially for future discussions on surface integrals.
📐 The Transformation of the Parameter Domain to the Torus Surface
The final paragraph discusses the transformation of the parameter domain to the surface of the torus. It highlights that for s and t both equal to pi over 2, the position vector simplifies to b times i plus a times k, which corresponds to a specific point on the torus. The paragraph reinforces that every s and t pair in the domain can be transformed to a unique point on the torus surface through the position vector-valued function. It also mentions that the parameterization is crucial for understanding surface integrals and reiterates the importance of visualization in grasping these mathematical concepts.
Mindmap
Keywords
💡Parameterization
💡Torus
💡Visualization
💡Circle
💡Trigonometry
💡Sine and Cosine
💡Position Vector-Valued Function
💡Surface Integrals
💡Domain
💡Unit Vectors
💡Right Triangle
Highlights
The introduction of parameterizing a torus, or a doughnut shape, which is a fundamental concept in mathematics and geometry.
The use of two parameters, s and t, to describe the position on the torus, emphasizing the importance of visualization in understanding the concept.
The parameter s represents the angle between the radius and the x-y plane, ranging from 0 to 2 pi, which is crucial for the torus's top view representation.
The parameter t represents the rotation of the entire circle around the z-axis, and its range is also from 0 to 2 pi, affecting the torus's side view.
The top views of the torus help in understanding the domain of the parameterization, with s and t defining lines corresponding to circles in 3D space.
The definition of the position vector-valued function that represents the parameterization of the torus, which is essential for further mathematical analysis.
The explanation of the z function as a function of s, derived from basic trigonometry, showing the distance above the x-y plane.
The description of the x and y coordinates as functions of both s and t, involving the radius of the circle and the distance from the origin.
The use of trigonometric functions (sine and cosine) to express the x and y components of the position vector, which is key to understanding the torus's shape in 3D space.
The clear explanation of how the x-coordinate is calculated using the sine of t and the y-coordinate using the cosine of t, providing a comprehensive understanding of the torus's geometry.
The representation of the position vector as a combination of i, j, and k unit vectors, which is a standard practice in vector calculus and linear algebra.
The example calculation of the position vector when s and t are both pi over 2, demonstrating the practical application of the parameterization.
The emphasis on the importance of visualization in understanding complex mathematical concepts such as the parameterization of a torus.
The mention of the significance of this parameterization in the context of surface integrals, indicating its relevance in advanced mathematical topics.
The detailed explanation of how every point on the torus can be transformed using the parameterization, showcasing the power of mathematical modeling.
The inclusion of the domain specifications for s and t, ensuring a complete understanding of the parameter space for the torus.
The final takeaway that highlights the practical and theoretical importance of the torus parameterization in mathematics and its applications.
Transcripts
Browse More Related Video
Introduction to parametrizing a surface with two parameters | Multivariable Calculus | Khan Academy
Surface integral example part 1: Parameterizing the unit sphere | Khan Academy
Example of calculating a surface integral part 1 | Multivariable Calculus | Khan Academy
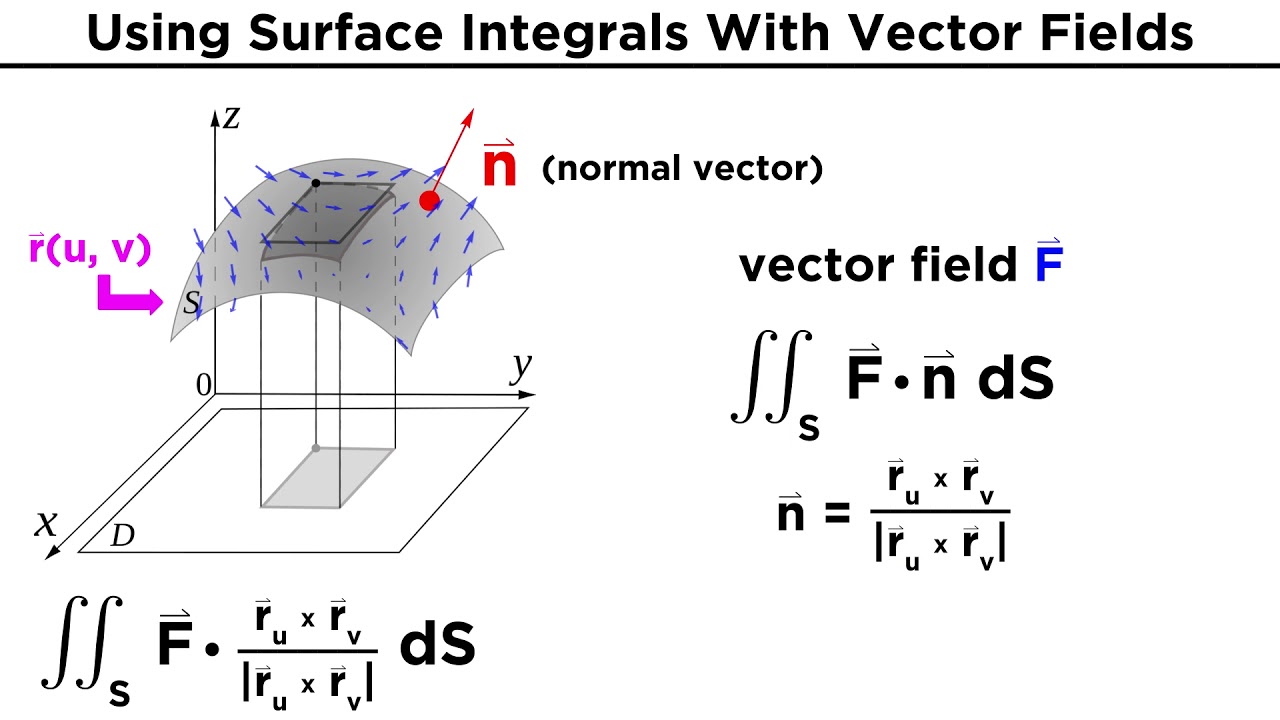
Evaluating Surface Integrals
Vector-Valued Functions (Introduction)

Transformations, part 3 | Multivariable calculus | Khan Academy
5.0 / 5 (0 votes)
Thanks for rating: