Tensor Calculus 14: Gradient explanation + examples
TLDRThis video delves into the mathematical concepts of the gradient operator 'del' and the exterior derivative 'D', building upon a previous explanation. It offers a formal derivation of the formula for the components of 'D' using tensor products and provides examples of computing 'del F' in different coordinate systems, emphasizing the importance of the metric tensor and its inverse in obtaining the correct vector field representation of the gradient, irrespective of the coordinate system used.
Takeaways
- 📚 The video expands on the differences between the gradient operator 'del' and the exterior derivative 'D', building upon a previous video that should be watched for foundational knowledge.
- 🔍 The gradient 'del F' is a vector field indicating the direction of positive values of F, while 'DF' is a covector field with orientations towards positive values of F.
- 📐 Conversion between 'del F' and 'DF' is achieved using formulas involving the metric tensor and its inverse, which are explained in the video.
- 📈 The video provides a formal derivation of the formula for the components of 'DF' using the tensor product, a concept explained in linked videos.
- 🌐 The tensor product of two covectors is detailed, illustrating how it acts as a 'double covector' that takes two vector inputs.
- 📝 The script explains the metric tensor as a linear combination of covector tensor products, which is key to understanding the relationship between vectors and covectors.
- 🧭 The video demonstrates how to compute 'del F' in different coordinate systems, emphasizing the importance of the inverse metric tensor components.
- 📊 The script includes examples of computing 'del F' in Cartesian ('C') and a modified coordinate system ('D'), highlighting the transformation between the two.
- ⚖️ The metric tensor for the Cartesian system is the identity matrix, simplifying calculations, while for the 'D' system, it involves a scaling factor.
- 🔑 The inverse metric tensor components are crucial for obtaining the correct formula for 'del F' in any given coordinate system.
- 🌍 The vector field 'del F' remains invariant across coordinate systems, with components appearing different due to the varying lengths of basis vectors in each system.
Q & A
What is the main difference between the gradient operator (del) and the exterior derivative (D)?
-The gradient operator (del F) is a vector field where the vectors point toward the positive values of F, while the exterior derivative (DF) is a covector field where the covectors are oriented towards the positive values of F.
How are the components of the gradient operator (del F) and the exterior derivative (DF) related?
-The components of del F and DF are related through the use of the metric tensor and its inverse, which are used for the conversion between the two.
What is a tensor product and why is it important in the context of this script?
-A tensor product is a mathematical operation that takes two covector inputs and produces a sort of double covector. It is important in this script because it is used to derive the formula for the components of the exterior derivative (DF) using the basis covector fields.
Can you explain the concept of a covector basis and how it is defined?
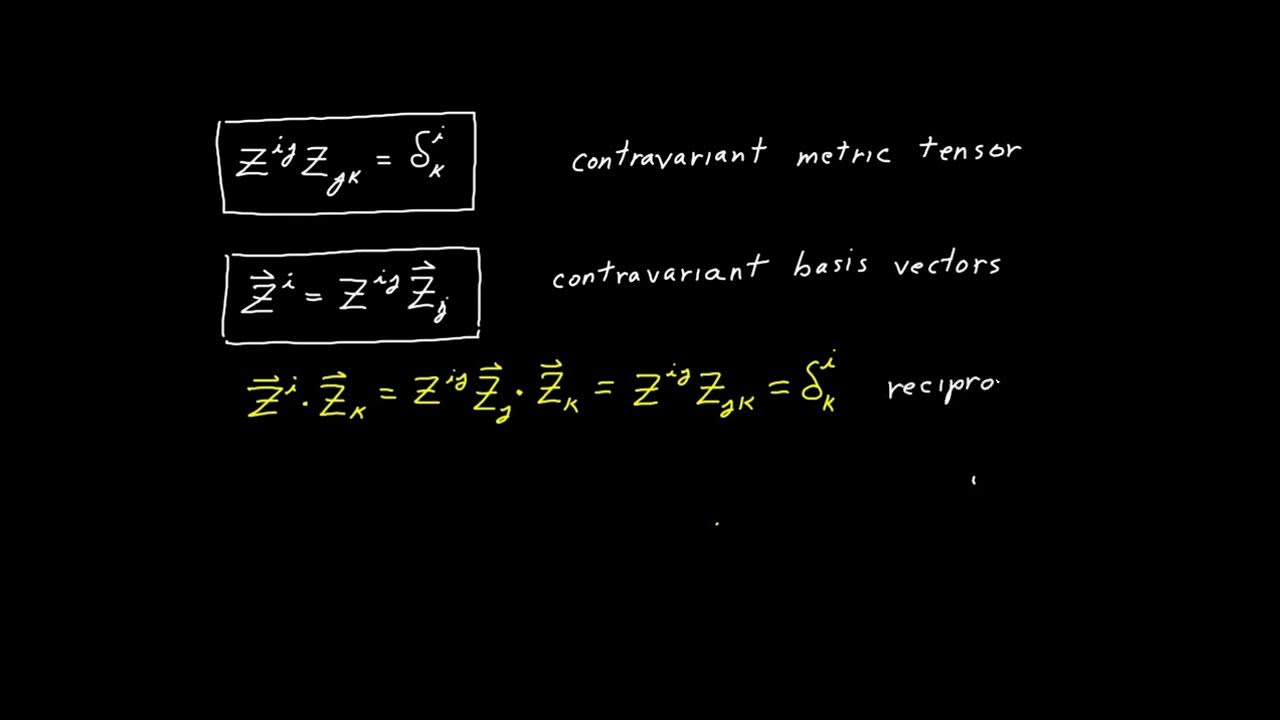
-A covector basis is a set of covectors that are dual to a given vector basis. In the script, given a vector basis u1 and e2, the covector basis epsilon1 and epsilon2 is defined using a specific formula that relates to the metric tensor.
What is the role of the metric tensor in the conversion between del F and DF?
-The metric tensor is used to convert between the components of the gradient operator (del F) and the exterior derivative (DF) by providing the necessary coefficients for the transformation.
How does the script derive the formula for the components of DF using the tensor product?
-The script provides a formal derivation by understanding the tensor product of two covectors, defining the covector basis, and then using the metric tensor and its components to compute the tensor product acting on vectors V and W, which leads to the formula for the components of DF.
What are the examples given in the script for computing del F in different coordinate systems?
-The script provides examples of computing del F in the Cartesian (C) coordinate system and a modified coordinate system (D), which is defined by doubling the number of grid lines of the C system.
How is the Jacobian matrix used in the context of coordinate transformations?
-The Jacobian matrix, also known as the forward transformation matrix, is used to convert between the basis vectors in different coordinate systems. It is computed using the derivatives of the coordinate transformation equations.
What is the significance of the inverse metric tensor in computing del F in different coordinate systems?
-The inverse metric tensor components are crucial for computing the correct components of del F in a given coordinate system. They account for the differences in the lengths and orientations of the basis vectors in different coordinate systems.
Why is it incorrect to assume that the gradient of a function or the del operator is the same in all coordinate systems?
-It is incorrect because the components of the gradient operator (del F) can appear different in different coordinate systems due to the varying lengths and orientations of the basis vectors. The correct formula for del F requires both the partial derivatives of the function and the inverse metric tensor components for the specific coordinate system.
How does the script demonstrate the invariance of the vector field del F across different coordinate systems?
-The script shows that although the components of del F may look different in the Cartesian and D coordinate systems, the actual vector field is invariant, meaning it is the same geometrically across the two systems.
Outlines
📚 Introduction to Gradient Operator and Exterior Derivative
This paragraph introduces the video's focus on explaining the gradient operator 'del' and the exterior derivative 'D'. It references a previous video for foundational differences between 'del F' (a vector field) and 'D F' (a covector field), and their conversion using metric and inverse metric tensors. The speaker also outlines the video's agenda: a formal derivation of the formula for 'DF' components using tensor products and examples of computing 'del F' in various coordinate systems.
🔍 Deep Dive into Tensor Products and Calculus Formulas
The speaker provides a deeper understanding of the tensor product of covector fields, using the Cartesian coordinate system as an example. They explain how to compute the output of a covector stack acting on a vector and how the tensor product of two covector fields creates a double covector. The paragraph delves into the formal derivation of the formula for 'DF' components, discussing the metric tensor as a linear combination of covector tensor products and the Einstein notation used in tensor calculus. The summary also includes the transition from the tensor product understanding to the calculus versions of the formulas, replacing basis covector fields with Cartesian covector fields.
📐 Coordinate Systems and Gradient Computation
This paragraph discusses the computation of the gradient 'del F' in different coordinate systems, specifically the Cartesian (C) and a modified system (D), which doubles the number of grid lines. The speaker explains the transformation equations between these systems and how to compute the Jacobian matrix, which is essential for converting between basis vectors in different coordinate systems. They also cover the metric tensor for both systems, emphasizing that it is the identity matrix in Cartesian coordinates but has different components in the D system. The paragraph concludes with the computation of 'del F' in both coordinate systems, illustrating that while components may differ, the underlying vector field remains invariant.
Mindmap
Keywords
💡Gradient Operator (del)
💡Exterior Derivative (D)
💡Metric Tensor
💡Inverse Metric Tensor
💡Tensor Product
💡Covector Field
💡Coordinate Systems
💡Jacobian Matrix
💡Kronecker Delta
💡Einstein Notation
💡Basis Vectors
Highlights
Introduction to expanding on the explanation of the differences between the gradient operator del and the exterior derivative D.
Basic differences between del F and D F, where del F is a vector field and DF is a covector field.
Conversion formulas between del F and DF components using metric tensor and inverse metric tensor.
Formal derivation of the formula for the components of DF using tensor product.
Explanation of the tensor product of two covectors and its application in vector and covector outputs.
Understanding the double covector created by the tensor product of two covectors and its function with two vector inputs.
Informal analogy of tensor products of basis covectors to matrices for computation.
Computation of the metric tensor acting on two vectors using summation and array notation.
Metric tensor as a linear combination of tensor products of covectors in Einstein notation.
Dot product formula for vectors V and W using the metric tensor and Kronecker delta.
Calculus versions of formulas replacing basis covectors with Cartesian basis covector fields.
Demonstration of del F dot V computation using metric tensor and covector fields.
Examples of computing del F in different coordinate systems: Cartesian and a custom D system.
Jacobian matrix computation and its role in converting between basis vectors in different coordinate systems.
Metric tensor components computation for Cartesian and D coordinate systems.
Inverse metric tensor components for both Cartesian and D systems and their significance.
Function F representation in Cartesian and D coordinates and its visualization.
Partial derivatives computation for function F in both coordinate systems.
del F computation in Cartesian and D systems, emphasizing the vector field invariance.
Importance of considering inverse metric tensor components for accurate del F computation in various coordinate systems.
Clarification on the common misconceptions about the gradient operator in non-Cartesian coordinate systems.
Transcripts
Browse More Related Video





5.0 / 5 (0 votes)
Thanks for rating: