Type III regions in three dimensions | Divergence theorem | Multivariable Calculus | Khan Academy
TLDRThe video script introduces the concept of a type 3 region in a three-dimensional space, denoted as R sub 3, which is defined by a domain D sub 3 in the x, z plane and y values bounded by two surfaces, h1 and h2, as functions of x and z. It illustrates how common shapes like spheres and cylinders can be categorized as type 1, 2, and 3 regions, while also pointing out configurations, such as an hourglass oriented along the y-axis, that do not fit the type 3 criteria.
Takeaways
- 📚 A type 3 region is defined in three dimensions, similar to type 1 and type 2 regions but extended to include the z-axis.
- 📐 The type 3 region, denoted as R_sub_3, includes all points (x, y, z) where the x, z pairs belong to a domain D_sub_3 and y is bounded by two surfaces.
- 🔍 The domain D_sub_3 is a subset of the x, z plane, determining the base for the three-dimensional region.
- 📈 The lower bound of y is defined by a surface h1(x, z), which y must be greater than or equal to.
- 📉 The upper bound of y is defined by another surface h2(x, z), which y must be less than or equal to.
- 🌐 The concept of type 3 regions allows for the inclusion of complex shapes like spheres and cylinders, which can be bounded by functions of x and z.
- 🎯 Spheres and cylinders can be considered type 3 regions as they meet the criteria of having y bounded by surfaces that depend on x and z.
- 🛑 An hourglass shape can also be a type 3 region if it is oriented correctly, with the domain in the x, z plane and y bounded by two surfaces.
- 🚫 A region that cannot be bounded by two surfaces that are functions of x and z alone does not qualify as a type 3 region.
- 🔄 The orientation of a shape is crucial in determining whether it is a type 3 region; an hourglass oriented along the y-axis does not meet the criteria.
- 💡 Understanding the definition of type 3 regions is essential for visualizing and working with complex three-dimensional mathematical problems.
Q & A
What is a type 3 region as defined in the script?
-A type 3 region is a set of all points in three dimensions where the x, y, and z coordinates are such that the x, z pairs belong to a domain D sub 3, and y varies between two surfaces that are functions of x and z.
What is the domain D sub 3 in the context of a type 3 region?
-The domain D sub 3 is the set of all x, z pairs that define the base of the region in the x, z plane.
How does the variable y relate to the surfaces in a type 3 region?
-In a type 3 region, y is bounded from below by the surface h1 of x, z and from above by the surface h2 of x, z.
Can a sphere be considered a type 1, type 2, and type 3 region?
-Yes, a sphere meets the constraints to be considered a type 1, type 2, and type 3 region because it can be defined by a domain in the x, z plane and y varying between two surfaces that are functions of x and z.
What is the domain for a cylinder in the x, z plane when considering it as a type 3 region?
-The domain for a cylinder in the x, z plane can be a rectangular region, defining the base of the cylinder.
How is the lower bound on y defined for a cylinder in a type 3 region?
-The lower bound on y for a cylinder is the side of the cylinder facing in a particular direction, as defined by the domain in the x, z plane.
What is an example of a shape that is not a type 3 region according to the script?
-An hourglass shape oriented along the y-axis, where y cannot be expressed as being between two surfaces that are functions of x and z, is not a type 3 region.
How can the region of an hourglass oriented along the y-axis be represented in terms of type 3 regions?
-The region of an hourglass oriented along the y-axis can be broken up into two type 3 regions, each defined by its own domain and surfaces for y.
What is the significance of the surfaces h1 and h2 in defining a type 3 region?
-The surfaces h1 and h2 are significant as they define the lower and upper bounds for the variable y, respectively, which is essential in the definition of a type 3 region.
Can the concept of type 3 regions be applied to any three-dimensional shape?
-Not all three-dimensional shapes can be considered type 3 regions. The shape must have a domain in the x, z plane and y must vary between two surfaces that are functions of x and z.
What is the visual representation of the upper and lower bounds on y for a sphere in the script?
-The visual representation of the upper bound on y for a sphere is the front side of the sphere, and the lower bound is the back side of the sphere, with y varying between these two surfaces.
Outlines
📐 Understanding Type 3 Regions in 3D Space
This paragraph introduces the concept of a type 3 region, which is defined as a set of points in three-dimensional space. The region, denoted as R sub 3, is characterized by a domain D sub 3 in the x-z plane and y values bounded by two surfaces that are functions of x and z. The lower bound is represented by the surface h1 of x, z, and the upper bound by the surface h2 of x, z. The paragraph uses the example of a sphere to illustrate how a type 3 region can be visualized, with the domain being a region in the x-z plane and y bounded by the sphere's surface. It also invites the reader to consider other shapes that could be type 3 regions and to distinguish between those that are and are not type 3 based on the given criteria.
🔍 Further Exploration of Type 3 Regions and Their Boundaries
The second paragraph delves deeper into the characteristics of type 3 regions, using the examples of a sphere, a cylinder, and an hourglass to demonstrate how these shapes can be classified as type 3 regions. It explains that the domain for these shapes is a region in the x-z plane, with y values bounded by the surfaces of the shapes themselves. The paragraph also discusses how to visualize the upper and lower bounds for y in these regions. It contrasts these examples with an hourglass oriented along the y-axis, which cannot be considered a type 3 region because y cannot be expressed as being between two surfaces that are functions of x and z alone. The paragraph concludes by suggesting that such a region could be divided into two type 3 regions, but as a whole, it does not meet the criteria for a type 3 region.
Mindmap
Keywords
💡Type 3 Region
💡Domain
💡Surface
💡Type 1 and Type 2 Region
💡Sphere
💡Cylinder
💡Hourglass
💡Coordinate Axes
💡Upper and Lower Bound
💡Not a Type 3 Region
Highlights
Introduction of type 3 regions as a set of points in three dimensions.
Definition of R sub 3 as the region in three dimensions with x, y, and z coordinates.
Explanation of the domain D sub 3 as the set of all x, z pairs.
Description of y varying between two surfaces as functions of x and z.
Illustration of the lower and upper bounds on y with surfaces h1 and h2.
Discussion on identifying type 1 and type 2 regions as potential type 3 regions.
Visual representation of a sphere as an example of a type 3 region.
Domain definition for the sphere in the x, z plane.
Explanation of the y bounds for the sphere with h1 and h2 surfaces.
Demonstration of how a cylinder can also be defined as a type 3 region.
Domain definition for a cylinder as a rectangle in the x, z plane.
Identification of the y bounds for the cylinder with its surfaces.
Introduction of an hourglass shape as another example of a type 3 region.
Domain boundary definition for the hourglass in terms of its cross-section.
Explanation of the y bounds for the hourglass with its front and back halves.
Discussion on what would not constitute a type 3 region, using an hourglass oriented along the y-axis as an example.
Explanation of how the non-type 3 region hourglass can be divided into two type 3 regions.
Transcripts
Browse More Related Video
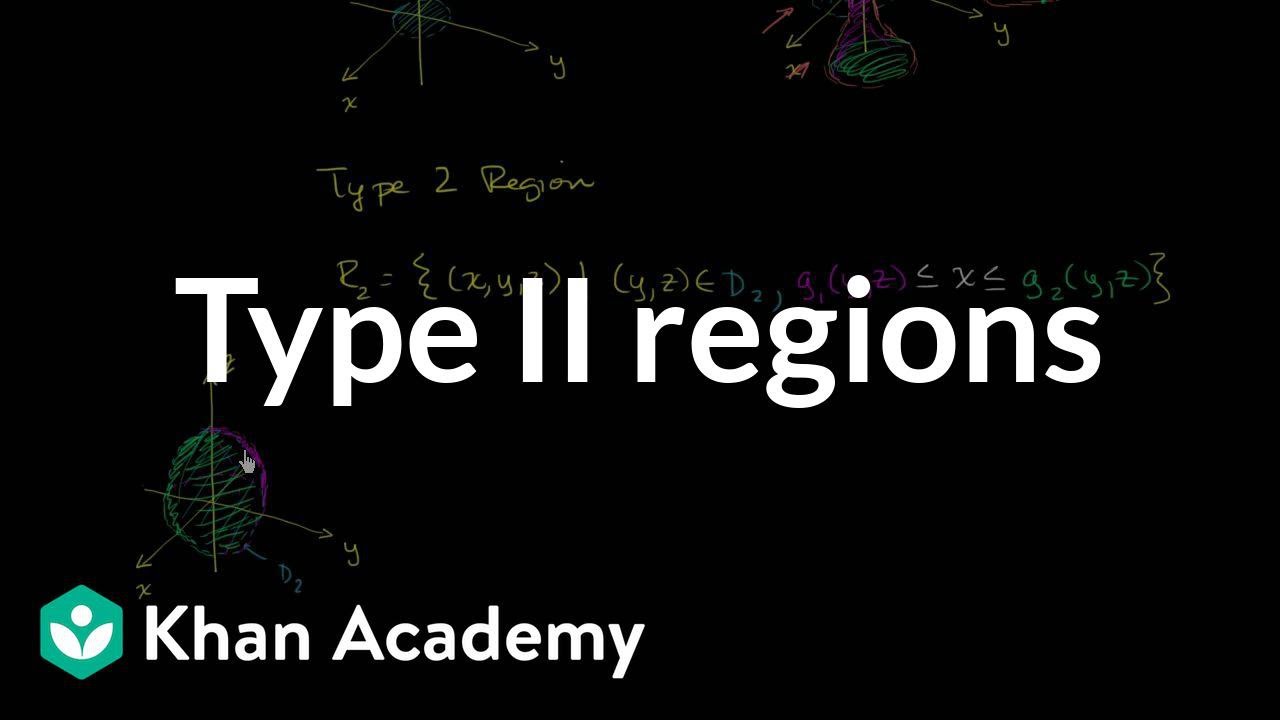
Type II regions in three dimensions | Divergence theorem | Multivariable Calculus | Khan Academy
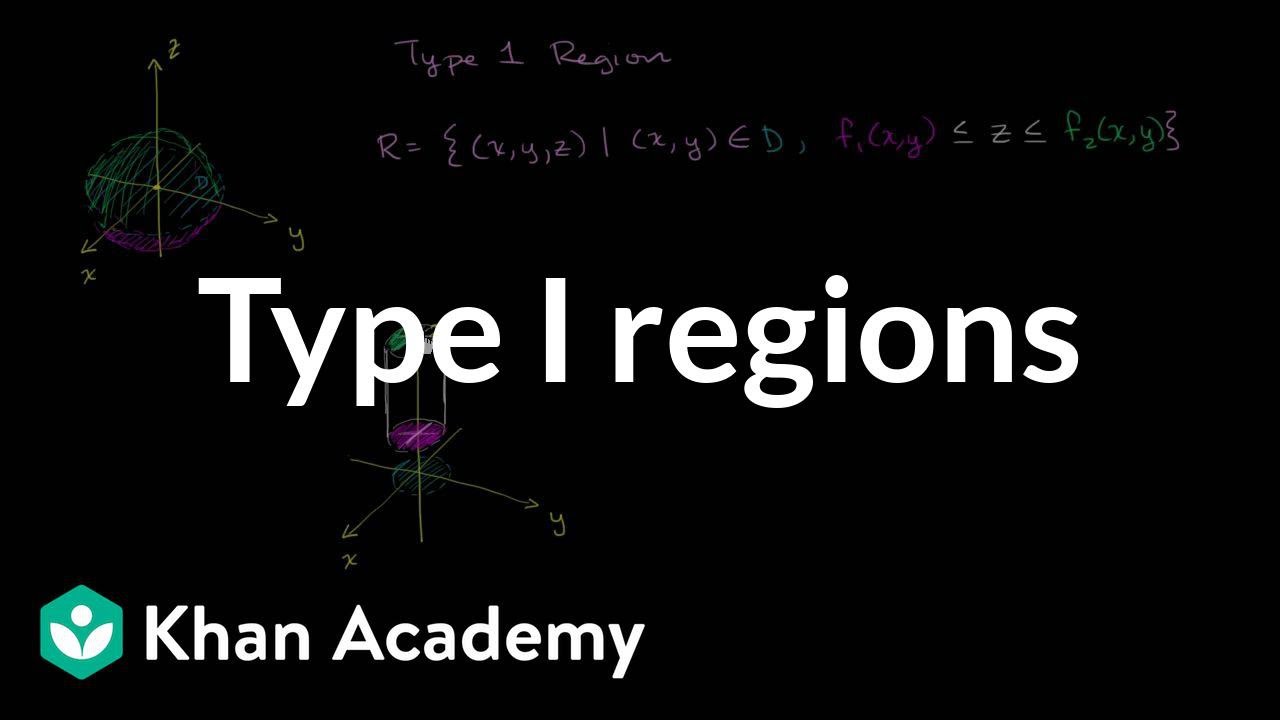
Type I regions in three dimensions | Divergence theorem | Multivariable Calculus | Khan Academy
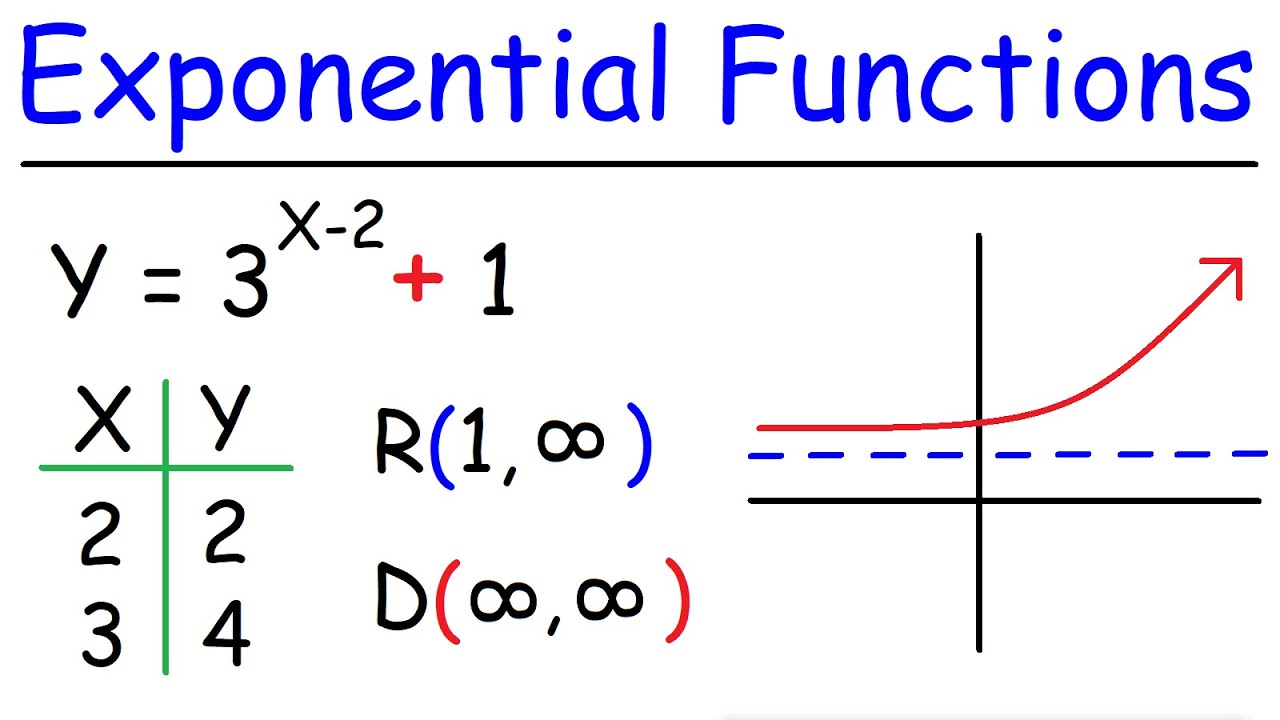
How To Graph Exponential Functions

Area Between Curves: Integrating with Respect to y (Example 2)
Area Between y=x^3 and y=3x-2 | MIT 18.01SC Single Variable Calculus, Fall 2010
Divergence theorem proof (part 2) | Divergence theorem | Multivariable Calculus | Khan Academy
5.0 / 5 (0 votes)
Thanks for rating: